Для эффективного отклонения неизвестных возмущений модельным прогнозирующим контроллером требуется следующее:
Специфичные для приложения модели возмущений
Обратная связь измерения для обновления оценок состояния контроллера
С помощью приложения MPC Designer и в командной строке можно изменить входные и выходные модели возмущений и модель шума измерений. Затем можно настроить веса настройки контроллера для улучшения отклонения возмущений.
MPC пытается предсказать, как известные и неизвестные события влияют на выходные переменные установки (OV). Известными событиями являются изменения измеренных входных переменных установки (входов СН и СД). Модель установки контроллера предсказывает влияние этих событий, и такие прогнозы могут быть достаточно точными. Дополнительные сведения см. в разделе Моделирование MPC.
Последствия неизвестных событий отображаются как ошибки в прогнозах известных событий. Эти ошибки по определению невозможно точно предсказать. Однако способность предвидеть тенденции может улучшить неприятие нарушений. Например, предположим, что система управления работает в почти устойчивом состоянии со всеми измеренными OV вблизи их прогнозируемых значений. Известных событий нет, но один или несколько из этих OV внезапно отклоняются от своего предсказания. Модели возмущения контроллера и шума измерений позволяют предоставить рекомендации по обращению с такими ошибками.
Предположим, что модель установки не содержит неизмеренных входов возмущений. Контроллер MPC затем моделирует неизвестные события с использованием модели выходного возмущения. Как показано в MPC Modeling, модель возмущений на выходе не зависит от установки, и ее выход непосредственно дополняет модель установки.
С помощью MPC Designer можно указать тип шума, который должен повлиять на OV каждого завода. В приложении на вкладке Настройка в разделе Дизайн щелкните Модели оценки > Модель нарушения вывода. В диалоговом окне Выходная модель возмущения в раскрывающемся списке Обновить модель выберите указание пользовательского канала модели по каналам.
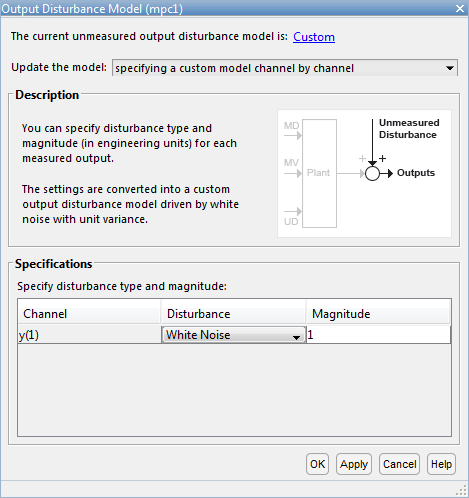
В разделе «Спецификации» в столбце «Возмущение» выберите одну из следующих моделей возмущений для каждого выхода:
White Noise - Ошибки прогнозирования обусловлены случайным нулевым средним белым шумом. Этот вариант подразумевает, что воздействие возмущения является кратковременным и, следовательно, требует умеренной, краткосрочной реакции контроллера.
Random Step-like - Ошибки прогнозирования обусловлены случайным ступенчатым возмущением, которое длится бесконечно долго, поддерживая приблизительно постоянную величину. Такое нарушение требует более агрессивной, устойчивой реакции контроллера.
Random Ramp-like - Ошибки прогнозирования обусловлены случайным беспорядком, похожим на рампу, который длится бесконечно долго и имеет тенденцию расти со временем. Такое возмущение требует еще более агрессивной реакции контроллера.
Программное обеспечение Model Predictive Control Toolbox™ представляет каждый тип возмущения как модель, в которой белый шум с нулевой средней и единичной дисперсией поступает в динамическую систему SISO, состоящую из одного из следующих элементов:
Статический коэффициент усиления - для возмущения белого шума
Интегратор последовательно со статическим усилением - для ступенчатого возмущения
Два интегратора последовательно со статическим усилением - Для отклонений в виде клина
Можно также задать входную величину белого шума «Величина» для каждой модели возмущений, переопределяя допущение единичной дисперсии. По мере увеличения величины шума контроллер более агрессивно реагирует на данную ошибку прогнозирования. Заданная величина шума соответствует статическому коэффициенту усиления в модели SISO для каждого типа шума.
Можно также просмотреть или изменить модель выходного возмущения из командной строки, используя getoutdist и setoutdist соответственно.
MPC также пытается отличить возмущения, которые требуют ответа контроллера, от шума измерения, который контроллер должен игнорировать. С помощью MPC Designer можно задать ожидаемую величину и характер шума измерения. В приложении на вкладке «Настройка» в разделе «Дизайн» выберите «Модели оценки» > «Модель шума измерений». В диалоговом окне Модель шумовой модели (Model Noise Model) в раскрывающемся списке Обновить модель (Update the model) выберите указание пользовательского канала модели по каналам.
В разделе «Спецификации» в столбце «Возмущение» выберите модель шума для каждого измеряемого выходного канала. Параметры шума совпадают с параметрами модели выходного возмущения.
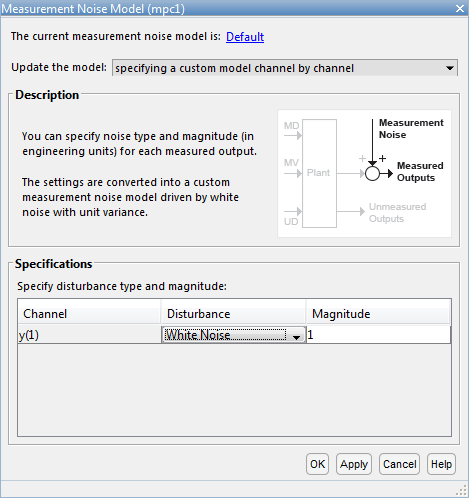
White Noise является опцией по умолчанию и почти во всех приложениях должна обеспечивать достаточную производительность.
При включении модели шума измерения контроллер рассматривает каждую ошибку прогнозирования как комбинацию возмущений и шумовых эффектов. Качественно, когда вы увеличиваете заданную величину шума, контроллер приписывает большую долю каждой ошибки предсказания шуму, и он реагирует менее агрессивно. В конечном счете, контроллер перестает реагировать на ошибки прогнозирования и изменяет свои MV только при изменении опорных сигналов OV или MV.
Когда модель установки включает в себя неизмеренные входы возмущений (UD), контроллер может использовать входную модель возмущений в дополнение к стандартной модели возмущений на выходе. Первый обеспечивает большую гибкость и создается автоматически по умолчанию. Если выбранная модель входного возмущения не позволяет полностью устранить устойчивые возмущения, модель выходного возмущения также добавляется по умолчанию.
Как показано в MPC Modeling, модель входных возмущений состоит из одного или более сигналов белого шума с единичной дисперсией и нулевым средним значением, поступающих в динамическую систему. Выходами этой системы являются UD-входы в модель установки. В отличие от модели нарушения на выходе, нарушения на входе влияют на выход установки более сложным образом, поскольку они проходят через динамику модели установки.
Как и в модели выходного возмущения, можно использовать MPC Designer для определения типа возмущения, ожидаемого для каждого пользовательского входа. В приложении на вкладке Настройка в разделе Дизайн щелкните Модели оценки > Модель возмущения ввода. В диалоговом окне Входная модель возмущения в раскрывающемся списке Обновить модель выберите указание пользовательского канала модели по каналам.
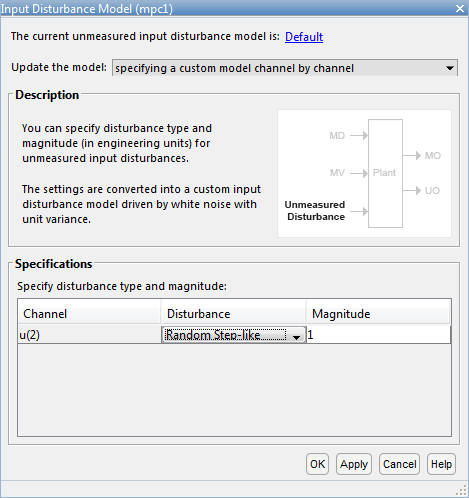
В разделе «Спецификации» в столбце «Возмущение» выберите модель шума для каждого измеряемого выходного канала. Опции модели входного возмущения совпадают с опциями модели выходного возмущения.
Общий подход заключается в моделировании неизвестных событий как нарушений, добавляющих к MV завода. Эти возмущения, называемые во многих текстах возмущениями нагрузки, реалистичны в том смысле, что некоторые неизвестные события являются сбоями в установке MV на значения, запрошенные контроллером. Модель возмущения нагрузки можно создать следующим образом.
Начните с модели завода LTI, Plant, в котором все входы известны (MV и MD).
Получение матриц состояния-пространства Plant. Например:
[A,B,C,D] = ssdata(Plant);
Предположим, что есть nu MV. Установите Bu = столбцы B, соответствующие MV. Кроме того, установите Du = столбцы D, соответствующие MV.
Переопределите модель установки, чтобы включить дополнительные входные данные nu. Например:
Plant.B = [B Bu]; Plant.D = [D Du]);
Чтобы указать, что новые входы являются неизмеренными нарушениями, используйте setmpcsignalsили установите Plant.InputGroup собственность.
Эта процедура добавляет входы возмущений нагрузки без увеличения количества состояний в модели установки.
По умолчанию, учитывая модель установки, содержащую нарушения нагрузки, программное обеспечение Model Predictive Control Toolbox создает входную модель нарушений, которая генерирует nym ступенчатые нарушения нагрузки. Если nym > nu, это также создает модель выходного возмущения с интегрированным белым шумом, добавляющим к (nym-nu) измеряемым выходам. Если nym < nu, последние (nu - nym) возмущения нагрузки по умолчанию равны нулю. Эти значения по умолчанию можно изменить с помощью MPC Designer.
Можно также просмотреть или изменить входную модель возмущения из командной строки с помощью getindist и setindist соответственно.
Как обсуждалось в оценке состояния контроллера, модели установки, возмущений и шума объединяются для формирования наблюдателя состояния, который должен обнаруживаться с использованием измеренных выходных сигналов установки. В противном случае при попытке использования контроллера появится сообщение об ошибке в окне команд.
Это ограничение ограничивает форму моделей возмущений и шума. Если какие-либо модели определены как что-либо, кроме белого шума со статическим усилением, их состояния модели должны быть обнаруживаемыми. Например, интегрированное возмущение белого шума, добавляющее к неизмеренному OV, было бы необнаружимым. MPC Designer не позволяет выбрать такую модель. Аналогично, количество измеренных возмущений, nym, ограничивает количество ступенчатых входов UD из входной модели возмущений.
По умолчанию программа «Панель инструментов управления прогнозированием модели» создает обнаруживаемые модели. При изменении допущений по умолчанию (или имени) и обнаружении ошибки обнаруживаемости можно вернуться к случаю по умолчанию.
В процессе проектирования можно настроить свойства отклонения возмущения контроллера.
Перед настройкой контроллера определите масштабные коэффициенты для каждой входной и выходной переменной установки (см. раздел Определение масштабных коэффициентов). В контексте моделирования возмущений и шума это делает предположение по умолчанию для входных сигналов белого шума с единичной дисперсией более вероятным, чтобы обеспечить хорошие рабочие характеристики.
Сначала сохраните модели возмущений в конфигурации по умолчанию.
После настройки весов функции затрат (см. Настройка весов) протестируйте реакцию контроллера на неизмеренное возмущение на выходе установки. В частности, если модель завода включает входные данные UD, смоделируйте нарушение, используя одно или несколько из них. В противном случае моделируют одно или более возмущений нагрузки, то есть ступенчатое возмущение, добавленное к назначенному СН. Как MPC Designer, так и sim команда поддерживает такое моделирование.
Если реакция в моделировании слишком вялая, попробуйте одно или несколько из следующего, чтобы вызвать более агрессивное отклонение возмущения:
Увеличение всех коэффициентов усиления модели возмущений на мультипликативный коэффициент. В MPC Designer выполните это путем увеличения величины каждого возмущения. Если это помогает, но недостаточно, увеличьте величину еще больше.
Уменьшение коэффициента усиления шума измерения на мультипликативный коэффициент. В MPC Designer выполните это путем увеличения величины шума измерения. Если это помогает, но недостаточно, увеличьте величину еще больше.
В MPC Designer на вкладке «Настройка» перетащите ползунок «Оценка состояния» вправо. Переход к более быстрой оценке состояния одновременно увеличивает коэффициенты усиления для моделей возмущений и уменьшает коэффициенты усиления для моделей шума.
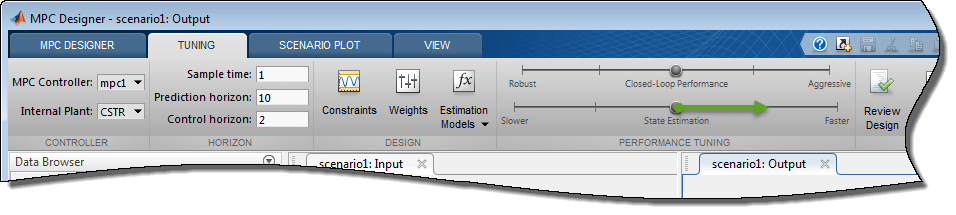
Если это помогает, но недостаточно, перетащите ползунок вправо.
Измените одно или несколько возмущений на модель, требующую более агрессивной реакции контроллера. Например, измените модель с белого шума на ступенчатое.
Примечание
Изменение возмущений таким образом добавляет состояния к модели возмущений, что может вызвать нарушения ограничения обнаруживаемости наблюдателя состояния.
Если реакция слишком агрессивна и, в частности, если контроллер не надежен, когда его прогноз известных событий неточен, попробуйте изменить предыдущие настройки.
