Рекомендуется сначала выбирать длительность интервала управления (свойство контроллера Ts), а затем удерживать его постоянным при настройке других параметров контроллера. Если станет очевидно, что первоначальный выбор был бедным, можно пересмотреть Ts. В этом случае может потребоваться повторное изменение других параметров настройки.
Качественно, по мере снижения Ts, отказ от неизвестного нарушения обычно улучшается, а затем плато. Значение Ts, при котором рабочие поверхности зависят от динамических характеристик установки.
Однако по мере уменьшения Ts вычислительные усилия резко возрастают. Таким образом, оптимальным выбором является баланс производительности и вычислительных усилий.
В модельном прогнозирующем управлении горизонт прогнозирования p также является важным соображением. Если выбирается сохранение постоянной длительности горизонта прогнозирования (произведение p * Ts), p должен изменяться обратно с Ts. Многие размеры массива пропорциональны р. Таким образом, с увеличением p возрастают требования к памяти контроллера и время решения QP.
При выборе Ts необходимо учитывать следующее:
В качестве грубой рекомендации установите Ts от 10% до 25% от минимального требуемого времени отклика по замкнутому циклу.
Запустите, по крайней мере, одно моделирование, чтобы увидеть, значительно ли улучшается отклонение неизмеренного нарушения при снижении Ts вдвое. Если да, рассмотрите возможность пересмотра Ts.
Для управления технологическим процессом обычно используется Ts > > 1 с, особенно когда ПДК контролирует одноконтурные контроллеры более низкого уровня. Для других приложений, таких как автомобильная или аэрокосмическая, может потребоваться Ts < 1. Если время, необходимое для решения QP в режиме реального времени, превышает требуемый интервал управления, рассмотрите вариант «Явный MPC».
Для установок с задержками количество переменных состояния, необходимых для моделирования задержек, обратно пропорционально Ts.
Для неустойчивых установок с разомкнутым контуром, если p * Ts слишком велик, так что ответы на шаг установки становятся бесконечными в течение этого периода времени, ключевые параметры, необходимые для вычислений MPC, становятся неопределенными, генерируя сообщение об ошибке.
Контроллер наследует единицу времени от модели завода. В частности, контроллер использует TimeUnit свойство объекта LTI модели завода. Значение этого свойства по умолчанию - секунды.
Предположим, что текущий интервал управления равен k. Горизонт предсказания p - это количество будущих интервалов управления, которые контроллер MPC должен оценивать посредством предсказания при оптимизации своих MV на интервале управления k.
Рекомендуется выбирать p на ранней стадии проектирования контроллера, а затем удерживать его постоянным при настройке других настроек контроллера, таких как веса функции затрат. Другими словами, не используйте регулировки p для настройки контроллера. Вместо этого значение p должно быть таким, чтобы контроллер был внутренне стабилен и ожидал нарушения ограничений достаточно рано, чтобы позволить корректирующее действие.
Если требуемое время отклика по замкнутому контуру равно T, а интервал управления равен Ts, попробуйте p так, чтобы T ≈ pTs.
Задержки установки накладывают нижнюю границу на возможное время отклика по замкнутому контуру. Выберите p соответственно. Чтобы проверить нарушение этого условия, используйте review команда.
Рекомендуемая практика заключается в увеличении p до тех пор, пока дальнейшее увеличение не окажет незначительного влияния на производительность. Если установка является нестабильной с разомкнутым контуром, максимальное значение p - это количество контрольных интервалов, необходимых для того, чтобы реакция на шаг с разомкнутым контуром установки стала бесконечной. p > 50 редко требуется, если Ts слишком мал.
Неблагоприятные характеристики растения в сочетании с небольшим p могут генерировать внутри нестабильный контроллер. Для проверки этого состояния используйте review и увеличить p, если это возможно. Если p уже велик, рассмотрим следующее:
Увеличить Ts.
Увеличение весов функции затрат при приращениях среднего напряжения.
Измените горизонт управления или используйте блокировку СН (см. раздел Блокировка манипулируемых переменных).
Для аппроксимации поведения LQR (см. раздел «Веса и ограничения клемм») используйте небольшое значение p с взвешиванием клемм.
Горизонт управления m - это количество перемещений СН, оптимизируемых на интервале управления k. Горизонт управления находится между 1 и горизонтом прогнозирования Р. По умолчанию m = 2. Независимо от вашего выбора для m, при работе контроллера используется оптимизированное перемещение СН в начале горизонта, а любые другие отбрасываются.
Причины сохранения m < < p следующие:
Малое m означает меньшее количество переменных для вычисления в QP, решаемом на каждом контрольном интервале, что способствует более быстрым вычислениям.
Если установка включает задержки, важно m < p. В противном случае некоторые движения СН могут не влиять ни на один из выходов установки до конца горизонта прогнозирования, что приводит к сингулярной матрице Гессена QP. Чтобы проверить нарушение этого условия, используйте review команда.
Малый m обеспечивает (но не гарантирует) внутренний стабильный контроллер.
Можно определить время выборки, горизонт прогнозирования и горизонт управления при создании mpc контроллер в командной строке. После создания контроллера mpcObjможно изменить время выборки и горизонты, установив следующие свойства контроллера:
Время выборки - mpcObj.Ts
Горизонт прогнозирования - mpcObj.p
Горизонт управления - mpcObj.m
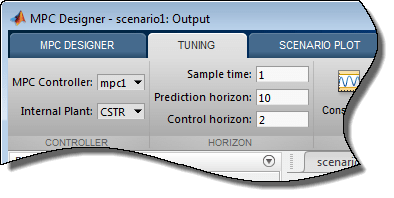
Кроме того, при разработке контроллера MPC с помощью приложения MPC Designer на вкладке Настройка в разделе Горизонт можно изменить время и горизонты выборки.