Привод гидроклапана двойного действия
Приводы клапанов

Используйте блок гидравлического привода клапана двойного действия в качестве пилотного привода для клапанов управления направлением, давлением или потоком в тех случаях, когда можно пренебречь всеми силами, за исключением силы пружины и расхода потока. Исполнительный механизм состоит из двух приводов одностороннего действия, действующих друг против друга. Каждый исполнительный механизм одностороннего действия состоит из поршня, центрирующей пружины и центрирующей шайбы. Когда к любому гидравлическому отверстию прикладывается управляющее давление, шайбой сжимается только одна центрирующая пружина, а другая упирается в корпус клапана и не оказывает никакого усилия на золотник. Когда оба управляющих давления отпущены, пружины прижимают шайбы к корпусу клапана, и золотник центрируется между ними. Эта конструкция позволяет каждому исполнительному механизму иметь различную пружину, усилие предварительной нагрузки и площадь поршня.
Когда давление, приложенное к поршню, создает достаточное усилие для преодоления предварительной нагрузки пружины, поршень перемещается в противоположное положение до тех пор, пока не достигнет максимального хода. Давление, приложенное к порту X, сдвигает клапан в x-направление, преодоление пружины, расположенной в камере Y. Давление, приложенное к порту Y, сдвигает клапан в y-направление, преодоление пружины, расположенной в камере X.
Исполнительный механизм моделируется в соответствии со следующими уравнениями:
py· Ay
Fprx
Fpry
Если F > = 0 ,
orfor F > = Fmaxy
Если F < 0,
− strx· или | F | > = Fmaxx
где
| F | Усилие, действующее на клапан |
| s | Перемещение поршня |
| пкс | Давление в камере привода X |
| py | Давление в камере Y привода |
| Топор | Площадь торца клапана в камере X |
| Да | Площадь торца клапана в камере Y |
| strx | Ход клапана в x- направление |
| stry | Ход клапана в y- направление |
| Fprx | Подпружиненное усилие пружины камеры X |
| Fmaxx | Максимальное усилие пружины камеры X |
| Fpry | Подпружиненное усилие пружины камеры Y |
| Fmaxy | Максимальное усилие пружины камеры Y |
| или | Ориентация привода по отношению к глобально назначенному положительному направлению. Если давление, приложенное к порту X, перемещает поршень в положительном направлении или равно 1. Если давление, приложенное к порту X, перемещает поршень в отрицательном направлении или равно -1. |
Соединения X и Y являются гидравлическими консервационными отверстиями, связанными с клапанными камерами. Соединение Р представляет собой физический сигнальный порт, выход которого соответствует перемещению поршня. Давление, приложенное к порту X, перемещает поршень в положительном или отрицательном направлении в зависимости от значения параметра ориентации привода.
Предполагается, что расход потока, связанный с движением клапана, является незначительным.
Предполагается, что инерция, трение и гидравлические осевые силы малы и не учитываются.
Зазоры между клапаном и шайбами не учитываются.
Эффективная площадь поршня в порту X. Значение параметра должно быть больше нуля. Значение по умолчанию: 2e-4 м ^ 2.
Эффективная площадь поршня в отверстии Y. Значение параметра должно быть больше нуля. Значение по умолчанию: 2e-4 м ^ 2.
Сила предварительной нагрузки пружины в порту X. Значение по умолчанию: 0.
Сила предварительной нагрузки пружины в порту Y. Значение по умолчанию: 0.
Максимальная сила пружины камеры X. Значение параметра должно быть больше силы предварительной нагрузки пружины. Значение по умолчанию: 50 N.
Максимальная сила пружины камеры Y. Значение параметра должно быть больше силы предварительной нагрузки пружины. Значение по умолчанию: 50 N.
Ход поршня в камере X. Значение параметра должно быть больше или равно нулю. Значение по умолчанию: 5e-3 м.
Ход поршня в камере Y. Значение параметра должно быть больше или равно нулю. Значение по умолчанию: 5e-3 м.
Указывает ориентацию привода по отношению к глобально назначенному положительному направлению. Привод может быть установлен двумя различными способами в зависимости от того, перемещается ли поршень в положительном или отрицательном направлении при приложении давления на его входе. Если давление, приложенное к порту X, перемещает поршень в отрицательном направлении, установите для параметра значение Acts in negative direction. Значение по умолчанию: Acts in positive direction.
Блок имеет следующие порты:
XПорт гидравлической экономии, связанный с камерой клапана X.
YПорт гидравлической экономии, связанный с камерой клапана Y.
PФизический сигнальный порт, который выдает перемещение поршня.
На следующем рисунке показан типичный блок управления насосом переменной производительности, который обеспечивает измерение нагрузки и ограничение давления (см. [1]). В блоке компенсатор, воспринимающий нагрузку, изменяет рабочий объем насоса для поддержания заданного перепада давления на регулируемом отверстии, в то время как компенсатор, ограничивающий давление, не позволяет давлению насоса превышать предел давления.
Этот тип управления реализуется на примере гидравлического двигателя, приводимого в действие насосом с регулируемой рабочей нагрузкой. На следующей иллюстрации показана схема блока «Управление» в модели примера.
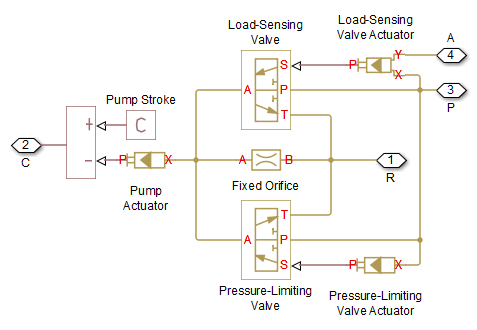
В модели имеется три гидравлических привода клапанов:
Привод клапана ограничения давления - привод одностороннего действия, который управляет клапаном ограничения давления.
Привод насоса - привод клапана одностороннего действия, который действует на устройство управления рабочим объемом насоса (управление хомутом).
Привод клапана датчика нагрузки - привод клапана двойного действия, который управляет клапаном датчика нагрузки. Его выход пропорционален разности между давлением насоса (порт P) и давлением нагрузки (порт A).
Откройте пример модели для просмотра параметров блоков.
[1] F. Yeapple, Handbook Fluid Power Design, Marcel Dekker, Inc., 1995
2-Position Привод клапана | 3-Position Привод клапана | Гидравлический клапан одностороннего действия | Привод пропорционального и сервоклапана
