Скоростной редуктор с высоким соотношением, основанный на движении циклоидального диска
Simscape/трансмиссия/зубчатые колеса

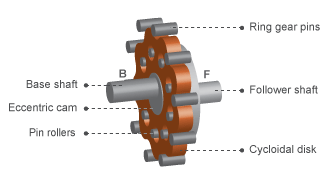
Блок Cycloidal Drive представляет собой компактный механизм с высоким соотношением скоростей, содержащий четыре ключевых компонента:
Эксцентриковый кулачок
Циклоидальный диск
Корпус зубчатого венца
Ролики штыревые
Эксцентриковый кулачок, выступающий из базового вала, расположен внутри циклоидального диска. Этот диск входит в зацепление с корпусом кольцевой шестерни. Штыревые ролики, отходящие от вала толкателя, сидят в соответствующих отверстиях на циклоидальном диске.
При нормальной работе вал основания приводит в действие эксцентриковый кулачок. Кулачок вращается внутри циклоидального диска, заставляя его вращаться по эксцентричной схеме вокруг оси смещения. При движении циклоидальный диск входит в зацепление с внутренними зубьями корпуса кольцевой шестерни. Внутренняя сетка изменяет направление скорости вращения на противоположное.
Штыревые ролики, выходящие из отверстий циклоидального диска, передают вращательное движение валу толкателя. Этот вал вращается против базового вала с сильно сниженной скоростью. Большое передаточное отношение является результатом почти одинакового числа циклоидальных дисков и зубьев кольцевого зубчатого колеса. Эффективное передаточное число -
nCnC,
где:
r - передаточное число редуктора.
nR - количество зубьев на кольцевом зубчатом колесе.
nC - количество зубьев на циклоидальном диске.
Передаточное число ограничивает угловые скорости базового и ведомого валов в соответствии с выражением
rstartB,
где:
λ F - угловая скорость вала толкателя.
λ C - угловая скорость основного вала.
Передаточное число также ограничивает моменты, действующие на базовый и ведомый валы, в соответствии с выражением
Tf,
где:
TB - чистый крутящий момент на базовом валу.
TF - чистый крутящий момент на ведомом валу.
Tf - потеря крутящего момента вследствие трения. Дополнительные сведения см. в разделе Модель зубчатых колес с потерями.
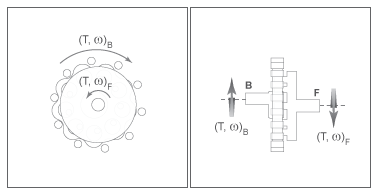
На рисунке показан циклоидальный привод на видах спереди и сбоку. Кинематика приводной системы вызывает изменение угловых скоростей вала основания и ведомого вала так, что два вала вращаются в противоположных направлениях.
Циклоидальный привод может работать в обратном режиме, то есть с мощностью, текущей от ведомого вала к базовому валу. В обратном режиме эффективность передачи крутящего момента обычно незначительна. Можно настроить эффективность, изменив значение параметра Эффективность (Efficiency) с ведомого вала на базовый вал.
Можно задать для модели трения потерь сетки значение:
No meshing losses - suitable for HIL simulation, которая игнорирует потери для обеспечения времени вычислений с поддержкой HIL.
Constant efficiency, которая является настройкой трения по умолчанию для версий блоков до R2020b. В этом случае задается эффективность компонента, которая остается постоянной на протяжении всего моделирования.
Temperature-dependent efficiency, которая моделирует эффективность компонентов, зависящую от температуры, путем создания таблицы поиска 1-D на основе вектора температуры и данного вектора эффективности компонента. Эта настройка также включает порт экономии тепла H. Этот порт принимает тепловой поток в блок, который преобразуется в температуру блока в соответствии с параметром тепловой массы зубчатого колеса.
Можно смоделировать влияние теплового потока и изменения температуры, включив дополнительный тепловой порт. Чтобы включить порт, задайте для модели трения значение Temperature-dependent efficiency.
Параметры «Переменные» используются для установки приоритетов и начальных целевых значений для переменных блока перед моделированием. Дополнительные сведения см. в разделе Установка приоритета и начальной цели для переменных блока.
