Полное моделирование привода автомобиля sdl_car Пример охватывает все основные методы моделирования трансмиссии и многие ключевые Simscape™ Driveline™ особенности. Включает в себя модели двигателя и трансмиссии и модель сцепки трансмиссия-колесо-дорога. Двигатель и трансмиссия связаны с гидротрансформатором. Запрограммированное управление сцеплением осуществляет передачу через четыре передачи во время моделирования. Сигналы давления сцепления являются плавными и более реалистичными, чем сигналы резкого давления сцепления в примерах с более простым приводом. В этом разделе описываются эти функции, подсистемы, их взаимосвязь и цели, что приводит к фактическому моделированию.
Откройте пример. Модель содержит переменные рабочего пространства модели для параметризации некоторых блоков. Сведения о создании, доступе и изменении переменных рабочей области модели см. в разделах Указание источника данных в рабочей области модели и Изменение данных рабочей области модели.
Транспортное средство с четырехступенчатой моделью трансмиссии
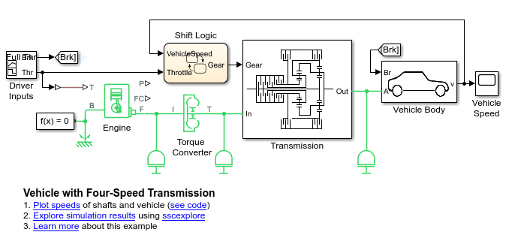
Основными подсистемами и компонентами трансмиссии являются:
Входные данные водителя - Профиль дросселя/тормоза
Двигатель - Системно-уровневая модель искрового и дизельного двигателей
Гидротрансформатор - Трехкомпонентный гидротрансформатор, состоящий из рабочего колеса, турбины и статора.
Подсистема передачи - 4-ступенчатая передача CR-CR
Логика сдвига - реализованный контроллер передачи Stateflow ®
Кузов транспортного средства - динамика транспортных средств, шин и тормозов
В то время как двигатель первоначально работает на холостом ходу с ненулевой скоростью, выходной сигнал трансмиссии и транспортное средство в целом первоначально не движутся.
Блок входных сигналов драйвера представляет собой блок Simulink ® Signal Builder, который подает сигналы дроссельной заслонки и тормоза на систему управления двигателем и трансмиссией. Откройте блок «Входные данные привода» для просмотра профиля дроссельной заслонки/тормоза для моделирования.
Дроссельный сигнал программируется для создания реалистичного профиля ускорения и согласования с последовательностью переключения передач, описанной в разделе «Управление сцеплениями». Дроссельный сигнал подается в двигатель и в контроллер передачи.
Сигнал тормоза подает входное усилие, которое приводит в действие торможение в блоке двухштекерного тормоза в подсистеме кузова транспортного средства.
Для целей моделирования системы двигатель или двигатель определяет выходной крутящий момент как функцию скорости трансмиссии. Двигатель имеет соединительный порт, соединяющий его с возможностью вращения с остальной частью системы.
Библиотека узлов содержит блоки, управляемые с помощью входного физического сигнала для дросселя. Можно параметризовать блок «Generic Engine» с помощью векторов для задания скорости и крутящего момента. Блок вычисляет максимально возможный крутящий момент как функцию частоты вращения двигателя в любой момент времени. Дроссельный сигнал определяет, сколько максимального крутящего момента может дать двигатель. Блок поршневого двигателя учитывает мгновенный крутящий момент, передаваемый на приводной вал двигателя. Мгновенный крутящий момент позволяет моделировать колебания в трансмиссии из-за вращения поршня. Для моделирования только поршневого механизма двигателя внутреннего сгорания используйте блок «Поршень».
sdl_car В примере используется блок Generic Engine, настроенный как тип искрового зажигания. Свойства блока, указанные в диалоговом окне, включают максимальную мощность, скорость при максимальной мощности и максимально возможную скорость двигателя. Чтобы просмотреть настройки механизма, щелкните блок «Механизм». Крутящий момент и движение двигателя моделируются относительно земли вращения, которая принимается в качестве базовой опорной точки двигателя и начальной точки трансмиссии или механических вращательных соединений в этой модели.
Simscape Driveline позволяет создавать сложные пользовательские модели двигателей. Несколько важных характеристик двигателя, которые следует учитывать в сложной модели:
Отличие стационарного поведения от запуска двигателя, когда функция крутящего момента двигателя еще не достигла максимально возможной огибающей
Детали производства механической энергии, такие как сжатие воздуха и топлива и сжигание
Дополнительные средства управления, выходящие за пределы того, что может быть представлено одним дроссельным сигналом
4-ступенчатая подсистема передачи CR-CR в sdl_car модель аналогична другим примерам с той же передачей. Свойства сцепления и планетарной передачи задаются в блоках с переменными рабочего пространства модели.
| Переменная рабочей области | Описание |
|---|---|
eff_tor_rad | Муфта: эффективный радиус крутящего момента (м) |
num_fric_surf | Сцепление: количество поверхностей трения в контакте |
engagement_area | Сцепление: площадь поверхности трения в контакте (м2) |
fric_coeff | Сцепление: коэффициент кинетического трения контактирующих поверхностей |
peak_normal | Сцепление: коэффициент статического (запирающего) трения контактирующих поверхностей |
velTol | Сцепление: допуск на блокировку скорости сцепления (рад/с) |
pressThresh | Сцепление: Нормализованное пороговое давление |
p0 | Муфта: нормализация физического давления (Па) |
Дополнительные сведения о зубчатых передачах, сцеплениях и коробках передач см. на справочной странице блока дискового фрикционного сцепления.
sdl_car модель соединяет двигатель и трансмиссию через блок гидротрансформатора.
Ступень гидротрансформатора
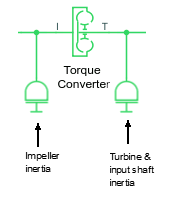
Подобно муфте, гидротрансформатор соединяет две независимые оси трансмиссии для передачи углового движения и крутящего момента с входного на выходной вал. Однако, в отличие от сцепления, гидротрансформатор никогда не запирается. Гидротрансформатор передает движение гидродинамической вязкостью, а не поверхностным трением. Таким образом, гидротрансформатор не проходит через отдельные этапы и устраняет нарушения в движении, присущие фрикционным сцеплениям.
Для имитации холостого хода двигателя в начале моделирования исходным условием инерции рабочего колеса является ненулевая угловая скорость. Начальное состояние инерции турбины и входного вала - нулевая скорость.
Дополнительные сведения об этих блоках см. на страницах ссылок «Гидротрансформатор» и «Инерция».
Трансмиссия подает выходной крутящий момент на конечную подсистему привода - кузов транспортного средства. Эта подсистема представляет инерцию транспортного средства (нагрузку на трансмиссию), колеса, тормоза, условия движения и контакт колеса с дорогой. Подсистема моделирует только задние колеса, приводимые в движение трансмиссией.
Подсистема конечного привода: кузов транспортного средства
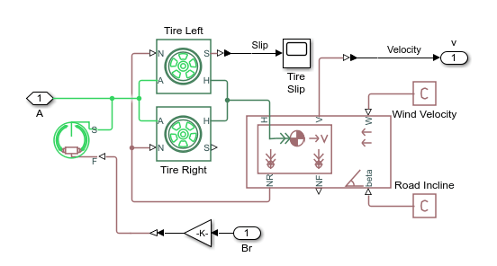
Подсистема имеет две основные области.
Правый и левый блоки шин принимают крутящий момент трансмиссии и вращение от трансмиссии в их поворотных окнах колесной оси (А). При нормальной или вертикальной нагрузке (N) этот крутящий момент и вращение преобразуются в силу тяги и поступательное движение в поступательных портах ступицы колеса (H).
Шины вращаются неидеально, проскальзывая, прежде чем они полностью создают тягу и реагируют на дорожное покрытие. Проскальзывание левой шины сообщается как физический сигнал и преобразуется в Simulink для использования в области проскальзывания шины.
Колодка двухколодочного тормоза представляет собой тормоз, выполненный в виде двух поворотных жестких колодок, которые симметрично установлены внутри или снаружи барабана и приводятся в действие одним исполнительным механизмом. Тормозной блок преобразует тормозной сигнал от блока входных сигналов водителя в силу привода, которая оказывает крутящий момент трения на вал, который соединяет тормозной барабан с шинными блоками.
Последовательность линий соединения трансмиссии модели заканчивается блоком «Кузов транспортного средства», который определяет геометрию транспортного средства, массу, аэродинамическое сопротивление и начальную скорость (ноль). Этот блок генерирует нормальные силы, которые блоки шины принимают как вертикальные нагрузки. Корпус транспортного средства принимает развиваемую тяговую силу и движение в его горизонтальном поступательном отверстии (Н). Модель кузова транспортного средства также принимает скорость ветра (W) и наклон дороги (бета), которые обеспечиваются физическими константами.
Сила вертикальной нагрузки заднего колеса (NR) передается обратно в блоки шины. Вертикальная нагрузка переднего колеса (NF) не используется.
Прямая скорость (V) транспортного средства преобразуется и сообщается через выход подсистемы в объем скорости транспортного средства.
sdl_car В примере моделируются только задние колеса, задние шины и кузов автомобиля, без более реалистичных компонентов трансмиссии дифференциалов и тормозов. sdl_vehicle_4wd На примере показано, как моделировать транспортное средство, имеющее четыре колеса и переднюю и заднюю дифференциальные передачи.
Для получения информации о моделировании тормозных систем с использованием сцеплений см. раздел Тормозное движение с использованием сцеплений и модель двухступенчатой трансмиссии с торможением.
Для выбора и включения соответствующего набора передач в модели используется блок Stateflow и расписание сцепления. Чтобы увидеть, как работают эти компоненты, вернитесь к основной модели sdl_car.
Блок Stateflow, который помечен как Shift Logic, реализует выбор передач для трансмиссии. Блок определяет, следует ли перемещать вверх или вниз на основе входных данных двух других компонентов модели. Блок входов машиниста выдает информацию о дросселе и торможении. Подсистема кузова транспортного средства обеспечивает скорость кузова транспортного средства по контуру обратной связи.
Чтобы открыть диаграмму потока состояний, дважды щелкните блок логики сдвига. Модуль Model Explorer используется для определения входных сигналов как дроссельной заслонки и скорости транспортного средства, а выходных данных - как требуемого числа передач. Два пунктирных состояния И отслеживают состояние зубчатой передачи и состояние процесса выбора зубчатой передачи. Общая диаграмма выполняется как дискретно-временная система. Схема потока состояний, показанная на рисунке, иллюстрирует функциональные возможности блока.
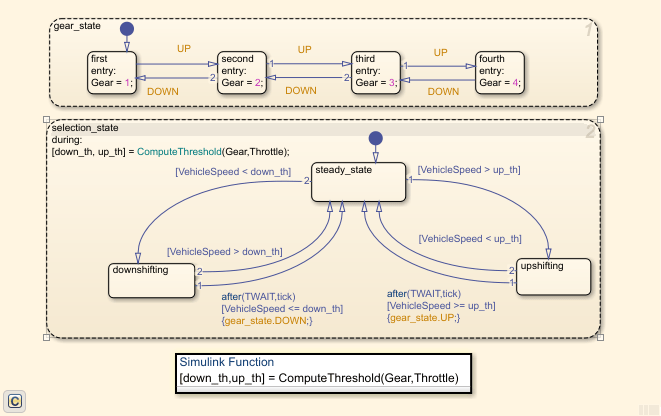
Модель вычисляет пороги скорости повышающей и понижающей передач как функцию мгновенных значений зубчатой передачи и дроссельной заслонки. Пока в steady_stateмодель сравнивает эти значения с текущей скоростью транспортного средства, чтобы определить, требуется ли сдвиг. Если это так, он входит в одно из состояний подтверждения (повышающая или понижающая передача), в котором записывается время ввода.
Если скорость транспортного средства больше не удовлетворяет условию переключения, в состоянии подтверждения модель игнорирует переключение и переходит обратно в steady_state. Установившееся состояние предотвращает посторонние сдвиги из-за шумовых условий. Если условие смены остается действительным в течение TWAIT засечек, модель переходит через нижнее соединение и, в зависимости от текущей передачи, транслирует одно из событий переключения. Модель снова активируется steady_state после перехода через одно из центральных соединений. Событие смены, которое передается в gear_selection активирует переход на соответствующую новую передачу. Блок Stateflow выводит информацию о передаче в подсистему расписания сцепления, которая находится в подсистеме трансмиссии.
Сигнал от блока Stateflow к схеме сцепления управляет пятью сцеплениями передачи CR-CR 4-Speed. Чтобы просмотреть расписание сцепления, откройте подсистему Transmission, а затем подсистему Clutch Schedule.
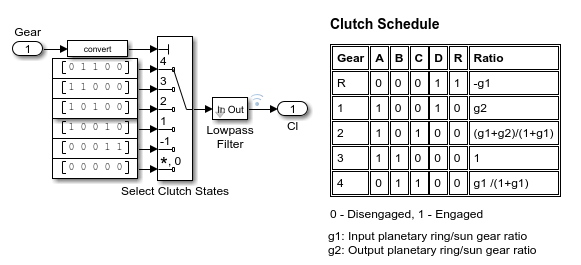
Модель настроена на имитацию в течение 50 секунд. В таблице показан профиль зубчатого колеса для моделирования.
| Временные диапазоны | Настройки зубчатой передачи CR-CR |
|---|---|
| 0–3.96 | 1 |
| 3.96–10.48 | 2 |
| 10.48–40.68 | 3 |
| 40.68–50 | 4 |
Смоделировать машину.
Чтобы просмотреть результаты в обозревателе результатов Simscape, в описании в окне модели щелкните Обзор результатов моделирования.
Для построения графика скорости вращения в оборотах в минуту и мощности в ваттах для двигателя:
На левой панели окна «Обозреватель результатов» разверните узел модуля.
Щелкните узел F, а затем узел w.
Чтобы изменить единицы измерения для оси y на обороты в минуту, нажмите кнопку со стрелкой под меткой оси y (rad/s) и выберите rpm.
Чтобы добавить график мощности, которую двигатель подает на гидротрансформатор, Ctrl + щелкните узел P.
Добавьте график проскальзывания шины.
Нажмите Ctrl, чтобы развернуть узел Vehicle_body.
Нажмите Ctrl, чтобы развернуть узел Tire_Left.
Ctrl + щелкните узел S.
Добавьте график скорости транспортного средства.
Нажмите Ctrl, чтобы развернуть второй узел Vehicle_body.
Ctrl + щелкните узел v.
Чтобы изменить единицы измерения на километры в час, нажмите кнопку со стрелкой под меткой оси y (m/s), выберите Specifyи в поле «Указать единицу измерения» введите km/hr.
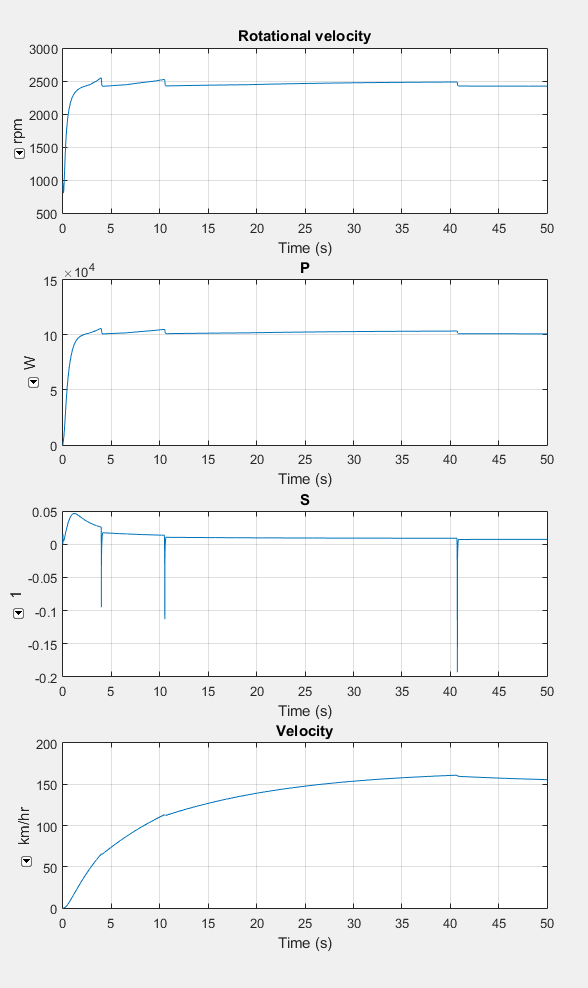
Графики показывают, что для:
Скорость и мощность двигателя - когда трансмиссия переходит на вторую передачу на 3,96 секунды, двигатель достигает максимальной скорости и мощности.
Проскальзывание шины - когда трансмиссия переходит на более высокие передачи, передаточное отношение увеличивается. Коэффициент привода падает, а проскальзывание шины уменьшается. Движение шины более близко приближается к идеальному (без скольжения) движению на более высоких скоростях.
Скорость транспортного средства - скорость увеличивается меньше с каждым переключением передач на одну, две и три. Скорость немного снижается перед началом стабилизации, когда автомобиль находится на четвертой передаче.
