Двухосное транспортное средство с продольной динамикой и движением и регулируемой массой, геометрией и характеристиками сопротивления
Simscape/Трансмиссия/Шины и транспортные средства
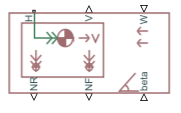
Блок кузова транспортного средства представляет собой двухосный кузов транспортного средства, движущийся в продольном направлении. Транспортное средство может иметь одинаковое или различное количество колес на каждой оси. Например, два колеса на передней оси и одно колесо на задней оси. Предполагается, что колеса транспортного средства идентичны по размеру. Транспортное средство может также иметь центр тяжести (CG), который находится на или ниже плоскости движения.
Блок учитывает массу кузова, аэродинамическое сопротивление, наклон дороги и распределение веса между осями за счет ускорения и профиля дороги. Опционально включают динамику пека и суспензии. Транспортное средство не движется вертикально относительно земли.
Блок имеет опцию включения внешней массы и внешней инерции. Масса, инерция и центр тяжести кузова транспортного средства могут изменяться в процессе моделирования в ответ на системные изменения.
Оси транспортного средства параллельны и образуют плоскость. Продольное, х, направление лежит в этой плоскости и перпендикулярно осям. Если транспортное средство движется с наклоном β, то нормальное направление z не параллельно силе тяжести, а всегда перпендикулярно продольной плоскости оси.
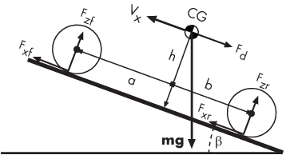
Этот рисунок и таблица определяют переменные модели движения транспортного средства.
Динамика и движение транспортного средства
Переменные модели транспортного средства
| Символ | Описание |
|---|---|
| g | Гравитационное ускорение |
| β | Угол наклона |
| m | Масса транспортного средства |
| h | Высота центра тяжести транспортного средства (КР) над землей |
| a, b | Расстояние между передней и задней осями соответственно от нормальной точки проекции CG транспортного средства на плоскость общей оси |
| Vx | Скорость транспортного средства. Когда Vx > 0, транспортное средство движется вперед. Когда Vx < 0, транспортное средство движется назад. |
| VW | Скорость ветра. При Vw > 0 ветер встречный. При Vw < 0 ветер попутный. |
| n | Количество колес на каждой оси |
| Fxf, Fxr | Продольные усилия на каждом колесе в передней и задней точках контакта с землей соответственно |
| Фзф, Фзр | Нормальные нагрузки на каждое колесо в передней и задней точках контакта с землей, соответственно |
| A | Эффективная площадь поперечного сечения фронтального транспортного средства |
| CD | Коэффициент аэродинамического сопротивления |
| ρ | Массовая плотность воздуха |
| Fd | Сила аэродинамического сопротивления |
Движение транспортного средства является результатом суммарного воздействия всех действующих на него сил и моментов. Продольные силы шины толкают транспортное средство вперед или назад. Вес мг транспортного средства действует через его центр тяжести (CG). В зависимости от угла наклона груз тянет транспортное средство на землю и тянет его назад или вперед. Независимо от того, движется ли транспортное средство вперед или назад, аэродинамическое сопротивление замедляет его. Для простоты предполагается, что сопротивление действует через КР.
Fxr)
(Vx + Vw)
Нулевое нормальное ускорение и нулевой крутящий момент наклона определяют нормальную силу на каждом переднем и заднем колесе.
(a + b)
(a + b)
Нормальные силы колеса удовлетворяют mgcosβn.
При включении внешней массы или инерции уравнения сдвигаются на взвешенное значение входного значения.
Ускорение по тангажу зависит от трех составляющих крутящего момента и инерции транспортного средства:
Fzrb) J
Где:
ɑ - ускорение тангажа.
f - продольная сила.
h - высота центра тяжести при измерении параллельно оси Z.
J - инерция.
При выборе линейной модели для жесткости подвески и демпфирования блок использует малую аппроксимацию угла для расчета шага. При выборе модели поиска в таблице блок использует векторы, заданные для расчета динамики шага. Уравнения жесткой остановки см. в разделе Поступательная жесткая остановка.
Вкладка «Переменные» используется для задания приоритетов и начальных целевых значений для переменных блока перед моделированием. Дополнительные сведения см. в разделе Установка приоритета и начальной цели для переменных блока.
В отличие от параметров блока, переменные не имеют условной видимости. На вкладке «Переменные» перечислены все существующие переменные блока. Если переменная не используется в наборе уравнений, соответствующих выбранной конфигурации блока, значения, указанные для этой переменной, игнорируются.
Блок кузова транспортного средства позволяет моделировать только продольную динамику, параллельную земле и ориентированную вдоль направления движения. Предполагается, что транспортное средство находится в тангаже и нормальном равновесии. Блок не моделирует шаг или вертикальное перемещение. Таким образом, уравнения предполагают, что колеса никогда не теряют контакт. Это ограничение может привести к отрицательным нормальным силам.
Шина (с параметризацией трения) | Шина (магическая формула) | Шина (простая) | Взаимодействие шин и дорог (магическая формула) | Жесткая остановка трансляций




