В этом примере показано, как управлять входом дросселя в модель транспортного средства Simscape™ Driveline™ с помощью блока силового агрегата Blockset™ продольного привода. Драйвер добавляется в модель с разомкнутым контуром, использующую блок Signal Builder для управления прямой связью. Добавление драйвера позволяет моделировать управление по замкнутому контуру, предоставляя опорную скорость и контур обратной связи.
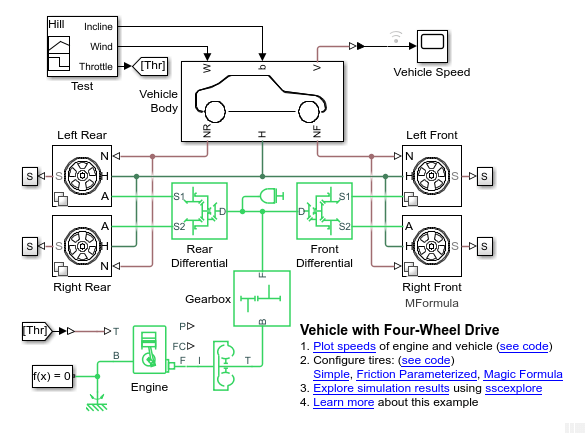
При моделировании с разомкнутым контуром блок Simulink ® Signal Builder используется для увеличения дроссельной заслонки. Смоделировать модель, чтобы увидеть отклик с разомкнутым контуром.
Откройте модель. В командной строке MATLAB ® введите этот код.
Включите сигнал, который поступает в блок объема RPM двигателя для регистрации и просмотра данных Simulink с помощью инспектора данных моделирования.
Значок регистрации![]() помечает сигнал в модели.
помечает сигнал в модели.
Увеличение времени моделирования для получения результатов в установившемся состоянии. Моделирование модели.
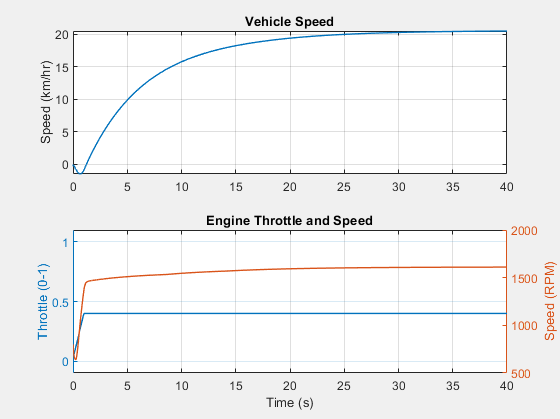
Даже несмотря на то, что входной сигнал дросселя не равен нулю в момент 0 моделирования, транспортное средство сначала катится вниз по холму, потому что входной сигнал слишком мал, чтобы преодолеть гравитационную силу наклона. Когда входной сигнал достаточно велик, транспортное средство ускоряется вверх по холму и оседает со скоростью ~ 20 км/ч .
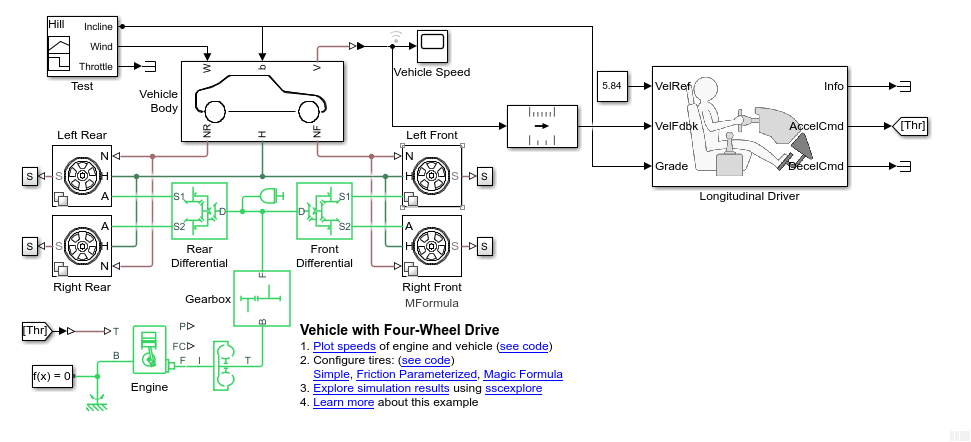
Для управления входом дроссельной заслонки добавьте блок продольного драйвера блока силового агрегата.
Добавьте в модель блок продольного драйвера.
Разверните окно модели для размещения блока продольного драйвера.
Добавьте блок продольного привода.
Измените источник входного сигнала дросселя из порта дросселя блока построителя сигналов на порт AccelCmd блока продольного драйвера и завершите не подключенный порт дросселя блоком терминатора.
Завершение выходных портов Info и DeclCmd в блоке продольного драйвера
Введите a 5.84 ссылочная скорость к порту VelRef блока продольного привода с использованием блока константы.
Введите сигнал угла наклона из блока Signal Builder в блок продольного драйвера, подключив выходной порт наклона к входному порту Grade.
Введите сигнал обратной связи по скорости в блок продольного привода с помощью блока преобразования единиц измерения для преобразования из км/ч в м/с.
Смоделировать модель с замкнутым контуром с помощью блоков Simple Tire и построить график результатов.
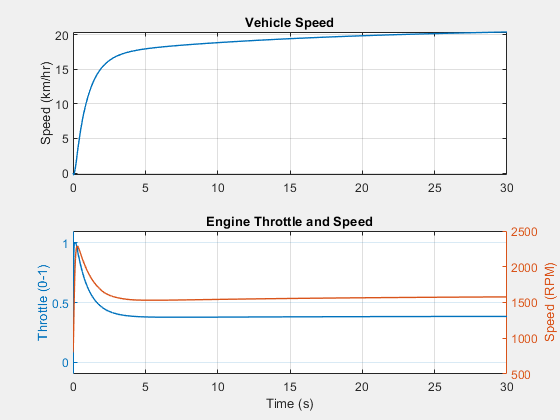
Блок привода быстро увеличивает входной сигнал дросселя в начале моделирования из-за разности между обратной связью по скорости и опорными сигналами.
Сравните результаты с открытым и замкнутым контуром с помощью инспектора данных моделирования.
Чтобы увидеть результаты в инспекторе данных моделирования, щелкните значок Сравнить (Compare), а затем в разделе Сравнения фильтров (Filter Comparisons) щелкните PS-Simulink Converter1:1.
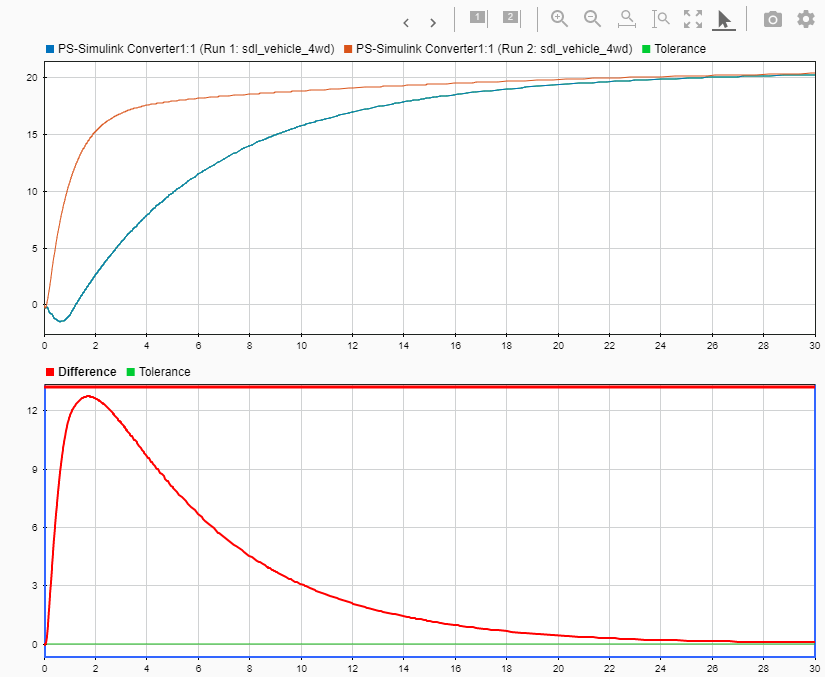
Первый график накладывает результаты моделирования с разомкнутым и замкнутым контуром. Это показывает, насколько быстрее управляемый автомобиль переходит в устойчивое состояние.
На втором графике показана численная разница в результатах двух моделирований. Он показывает, насколько эти два сигнала различаются в начале моделирования и как они в конечном итоге достигают одного и того же устойчивого состояния.
Можно также изучить результаты для других блоков шин.
Постоянный | Терминатор | Шина (с параметризацией трения) | Шина (магическая формула) | Шина (простая) | Преобразование единиц
