В этом примере выполняется объединение двух вращающихся инерций. В первой муфте инерции вращаются с одинаковой угловой скоростью вдоль одного вала (оси трансмиссии). Затем инерции вращаются с различными скоростями, когда они вращаются вдоль двух валов и связаны зубчатой передачей. Наконец, инерции соединены зубчатой передачей и приводятся в действие внешним крутящим моментом, так что они вращаются с различной скоростью и испытывают различные крутящие моменты. Для каждой модели в примере используются основные блоки Simscape™ Mechanical и Simscape Driveline™, такие как Инерция (Inertia), Простая передача (Simple Gear) и Конфигурация решателя (Solver Configuration).
Создайте первую версию простейшей нетривиальной модели трансмиссии, две инерции, вращающиеся вместе вдоль одной оси. Откройте библиотеки блоков Simscape Driveline, Simscape и Simulink ® и новое окно модели Simulink.
Перетащите в окно модели два блока «Инерция» (Inertia), два датчика идеального вращательного движения (Ideal Rotational Motion Sensor), два блока механической вращательной привязки (Mechanical Rotation Reference) и два блока PS-Simulink Converter.
Из библиотеки Simscape Utilities перетащите блок конфигурации решателя. Для каждой топологически отличной блок-схемы привода требуется только один экземпляр этого блока.
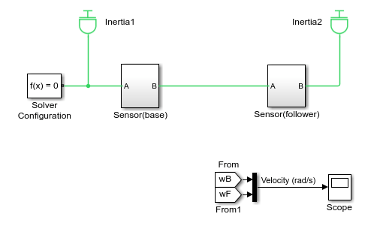
Из библиотеки Simulink перетащите область, мультиплексор и две пары блоков Goto и From. Подключите блоки, как показано на следующих рисунках. Подсистемы датчиков расположены иерархически.
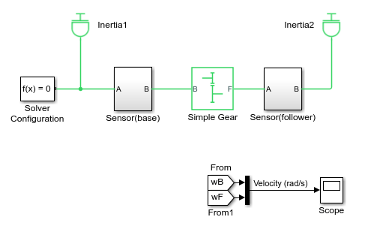
Модель с двумя вращающимися инерциями
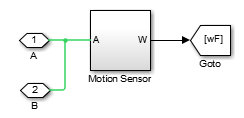
Подсистема датчиков
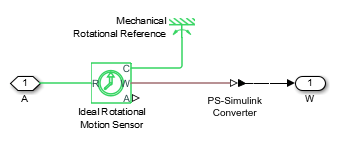
Подсистема датчиков движения
В начале моделирования, поскольку демпфирование отсутствует, инерции вращаются с заданной начальной скоростью. Линия соединения между двумя блоками инерции требует, чтобы они имели одинаковую скорость вращения. Чтобы задать начальную скорость вращения, откройте каждый блок инерции. На вкладке Переменные (Variables) установите флажок Вращательная скорость (Rotation velocity) и задайте для параметра Значение (Value) значение pi радиан/с (рад/с).
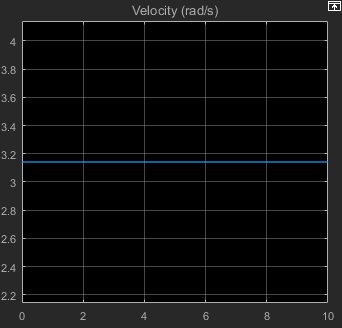
Откройте блок «Область» и запустите моделирование. Две угловые скорости постоянны при 3,14 радиана/с.
Измените созданную модель, связав две вращающиеся инерции с простой идеальной шестерней с фиксированным передаточным отношением.
Из библиотеки блоков привода Simscape перетащите блок простого зубчатого колеса в модель. Откройте блок. Изменение значения передаточного отношения толкателя к основанию по умолчанию на 1. Измените меню «Выходной вал вращается» на «В том же направлении, что и входной вал» и нажмите кнопку «ОК». Затем простая шестерня представляет два зубчатых колеса, вращающихся вместе с одинаковой скоростью в том же направлении, причем одно колесо находится внутри другого. Подключите блоки, как показано на следующем рисунке.
Модель с двумя вращающимися инерциями, соединенными зубчатым колесом
Оставить начальные угловые скорости при pi в блоках инерции.
Откройте область и запустите моделирование. Две угловые скорости постоянны при 3,14 радиана/с для обеих инерций.
Измените значение в меню «Выходной вал» на «В противоположном направлении к входному валу». Затем простая шестерня становится двумя колесами, вращающимися вместе в противоположных направлениях, причем два колеса находятся в зацеплении на их соответствующих наружных поверхностях. Изменение начальной скорости в Inertia2 на -pi.
Перезапустите моделирование. Две угловые скорости составляют 3,14 и -3,14 радиана/с для Inertia1 и Inertia2 соответственно. Вторая угловая скорость та же, но с противоположным знаком, потому что два тела вращаются в противоположных направлениях.
Снова установите в меню «Вращение выходного вала» значение «В том же направлении, что и у входного вала».
В окончательной версии модели простой передачи инерции приводятся в действие внешним крутящим моментом вместо запуска с фиксированными начальными угловыми скоростями. Внешний крутящий момент изменяется синусоидально. Вы можете найти завершенную версию этой модели в sdl_gear пример модели.
Из библиотеки Simscape Foundation скопируйте источник идеального крутящего момента и два блока датчика идеального крутящего момента, а также блок преобразователя Simulink-PS и другой блок механической привязки вращения. Из библиотеки Simulink перетащите блок синусоидальной волны и еще две пары блоков Goto и From.
Подключите блоки, как показано на следующих рисунках. Подсистемы датчиков крутящего момента расположены параллельно подсистемам датчиков движения внутри блоков подсистем датчиков. Установите начальные скорости обеих инерций в ноль. Изменение значения передаточного отношения толкателя к основанию по умолчанию на 2. Измените блок «Область», чтобы добавить другую ось для измерения крутящих моментов. Подключите другие блоки, как показано на рисунке.
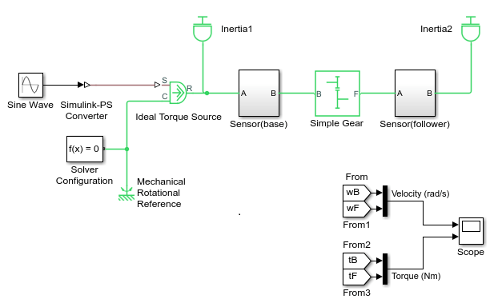
Модель с двумя вращающимися инерциями, соединенными зубчатым колесом и приводимыми в действие крутящим моментом
Обновленная подсистема датчиков
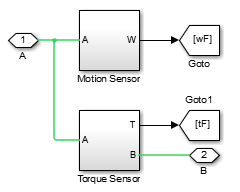
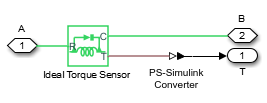
Подсистема датчика крутящего момента
Откройте блок «Область» и запустите моделирование.
Измеренные крутящие моменты и угловые скорости меняются синусоидально. Как и в предыдущих моделях, угловая скорость Inertia2 вдвое меньше угловой скорости Inertia1. Крутящий момент на втором (ведомом) валу в два раза больше, чем на первом, как того требуют законы зубчатой муфты.
Для блока «Простая передача» измените значение в меню «Выходной вал вращается» на «В противоположном направлении» для входного вала и перезапустите моделирование. В результате получаются одинаковые угловые скорости и моменты, за исключением того, что значения, связанные с Inertia2 и вторым валом, являются отрицательными, поскольку второе тело и второй вал вращаются в противоположных направлениях.
Механические блоки датчиков и источников, используемые в предыдущих моделях, иллюстрируют их двойственную природу. Они сами действуют как компоненты трансмиссии, но также позволяют вводить и извлекать физические сигналы, связанные с движением и крутящим моментом, включая соответствующие физические блоки. Эти физические сигналы можно использовать с другими блоками в среде физического моделирования Simscape или преобразовать их в безразмерные сигналы Simulink для использования в нефизической части модели. Блоки датчиков и источников имеют пары механических портов и соединены последовательно или поперек физических соединительных линий.
Механические блоки датчиков и источников имеют как механические консервационные порты, так![]() и физические сигнальные порты.
и физические сигнальные порты.![]()
Многие блоки привода Simscape также имеют сочетание механических и физических сигнальных портов.
Источник идеального крутящего момента впрыскивает крутящий момент вдоль линии соединения трансмиссии или последовательно с ней. Датчик идеального крутящего момента измеряет крутящий момент, протекающий вдоль линии соединения трансмиссии или последовательно с ней.
Датчик идеального вращательного движения сообщает о различиях между движениями двух портов соединения.
Чтобы извлечь абсолютное движение у порта R, подключите порт C к механическому опорному блоку, который приводит этот порт к нулевому движению.
