В этом примере показано, как изменять дорожные условия при моделировании испытательного стенда 4-х приводного транспортного средства. Модель представляет собой версию sdl_vehicle_4wd_testbed, которая обновлена для включения блоков профиля дороги как для передних, так и для задних шин. При движении транспортного средства параметры оси и положение центра тяжести (CG) определяют положение передней и задней осей. Блоки «Профиль дороги» используют положения оси для определения коэффициентов трения по углу транспортного средства и шинам на основе заданных параметров.
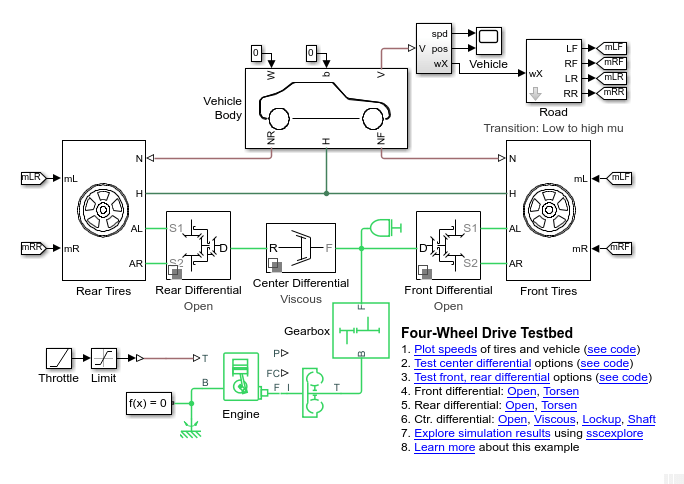
Исходная модель определяет коэффициенты магической формулы на основе положения транспортного средства относительно его положения в начале моделирования. На рисунках показаны исходная и обновленная модели.
Новая модель включает блоки профиля дороги как для правых, так и для левосторонних шин. Для открытия модели в командной строке MATLAB введите
open_system('sdl_vehicle_road_4wd_testbed')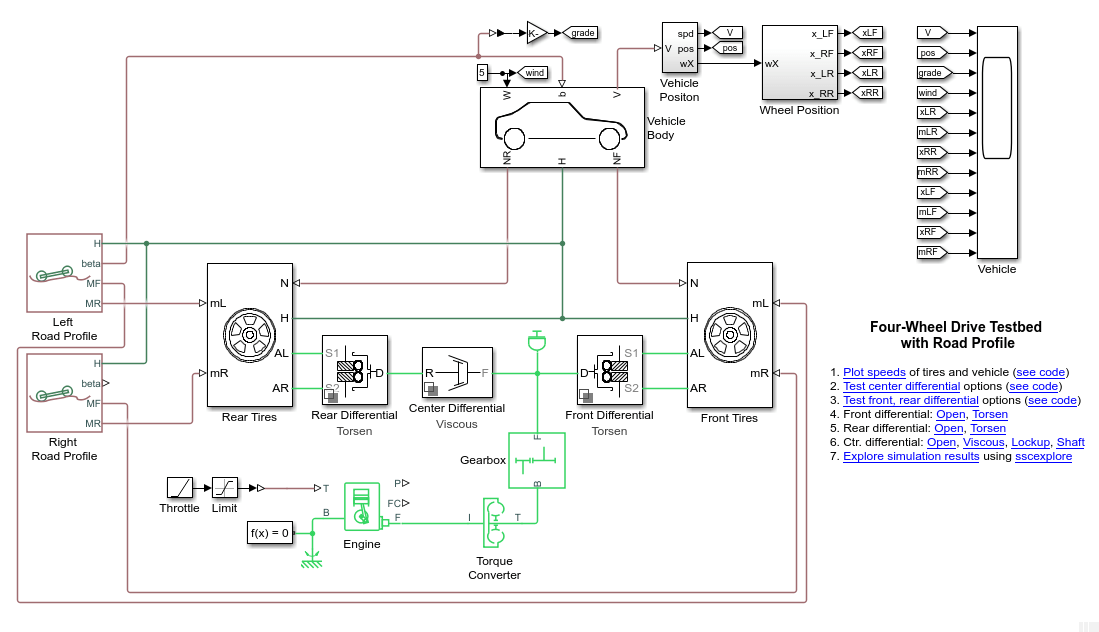
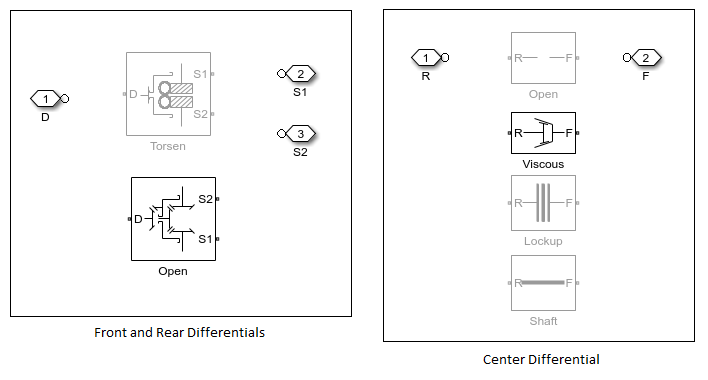
В обеих моделях передний, задний и центральный дифференциалы представлены вариационными подсистемами.
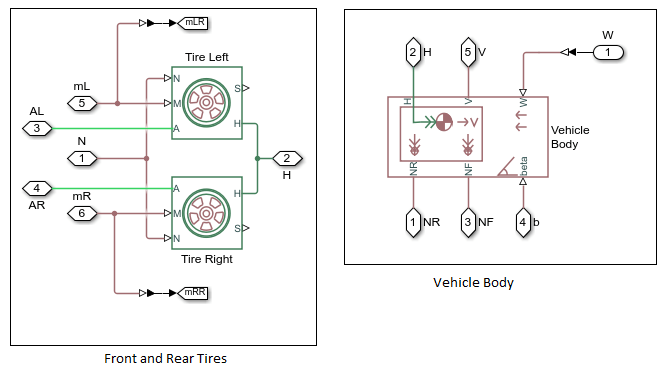
Передняя и задняя подсистемы шин содержат блоки Tire (Magic Formula), в то время как подсистема Vehicle Body является маской для блока Vehicle Body.
Обновлениями, позволяющими модели определять дорожные условия с помощью блоков профиля дороги, являются:
Замена подсистемы «Дорога» на подсистему «Положение колеса». Дорожная подсистема содержит три уровня подсистем, которые модель использует для определения коэффициентов магической формулы для шин во время моделирования.
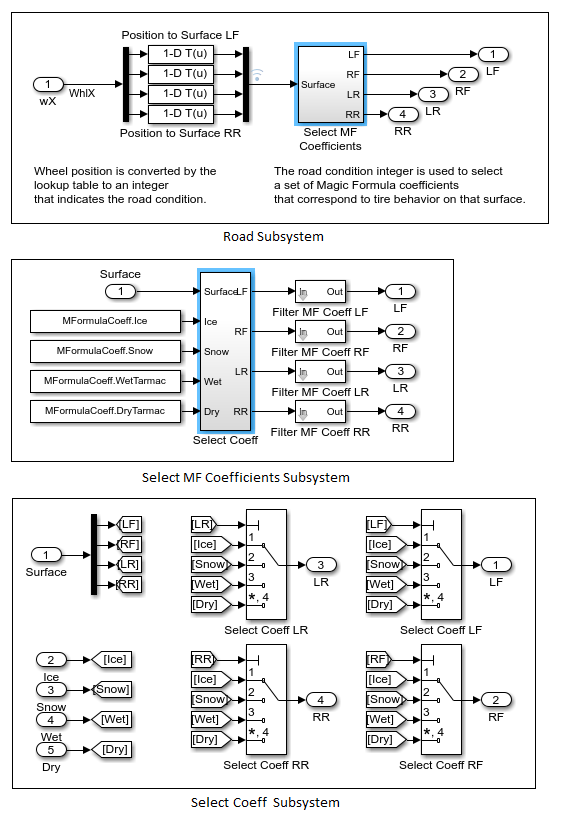
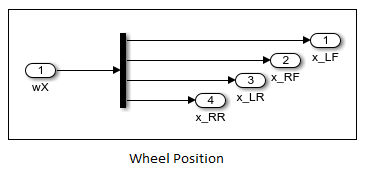
Добавление блоков Road Profile позволяет заменить систему Wheel Position гораздо более простой подсистемой Wheel Position. Новая подсистема демультиплексирует сигналы положения колеса.
Параметризация добавленных блоков профиля дороги для правых и левых шин:
Главный
Расстояние по горизонтали от КР до передней оси - x_f
Расстояние по горизонтали от КР до задней оси - x_r
Расстояние по горизонтали для вертикального профиля - x_height_vector
Вертикальный профиль - height_vector
Трение
Фрикционный выход - Physical signal Magic Formula coefficients
Расстояние по горизонтали для профиля трения - x_friction_vector
Коэффициенты магической формулы для передней оси - MF_M_matrix
Коэффициенты магической формулы для передней оси - MR_M_matrix
Позиционная переменная
Переопределить - выбрать
Начальное значение - x_0
Блок кузова транспортного средства Обновление основных параметров:
Расстояние по горизонтали от КР до передней оси - x_f
Расстояние по горизонтали от КР до задней оси - x_r
Определения переменных для модели:
x_f=1.4; x_r=1.6; x_height_vector=[-10, 0, 10]; height_vector=[0, 0, 0.25]; x_friction_vector = [ -10, 5, 10, 15 ]; MF_M_matrix = [10 1.9 1 0.97;... 4 2 0.1 1;... 12 2.3 0.82 1;... 10 1.9 1 0.97]; MR_M_matrix = [10 1.9 1 0.97;... 12 2.3 0.82 1;... 12 2.3 0.82 1;... 10 1.9 1 0.97]; x_0 = 0;
Дополнительные обновления окружающей среды:
Блок профиля дороги левой шины вводит переменную марку дороги. Блок усиления преобразует переменную уклона, бета, из радиан в градусы.
Встречный ветер включается с помощью ненулевого значения для блока константы.
Обновления сигнальных блоков:
Блоки «Порты» и «Порты ввода» заменяются блоками «Порт подключения».
Блоки Goto и From используются для передачи сигналов в область.
Визуализация данных и обновление журналов:
Блок «Объем» обновляется для отображения положений шин, коэффициентов магической формулы, встречного ветра и высоты дороги.
Имя симлога обновляется в соответствии с именем обновленной модели.
Код дифференциального теста и формирования графика обновляется для использования нового имени simlog.
Чтобы выполнить моделирование и создать график результатов, щелкните Скорости графика (Plot speeds).
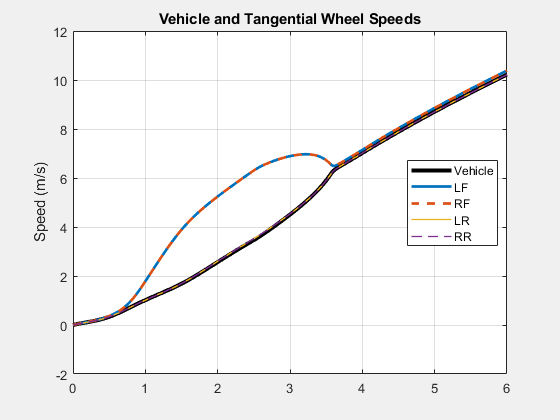
Передние шины испытывают проскальзывание в середине моделирования из-за скользких условий, связанных с [4 2 0.1 1] Магические коэффициенты, которые используются при моделировании, когда положения передних шин находятся в 5-10 метрах от исходных положений.
Чтобы увидеть, как наклон дороги, встречный ветер, положение шины, скорость и положение транспортного средства соотносятся друг с другом и с магическими коэффициентами, откройте блок Scope.
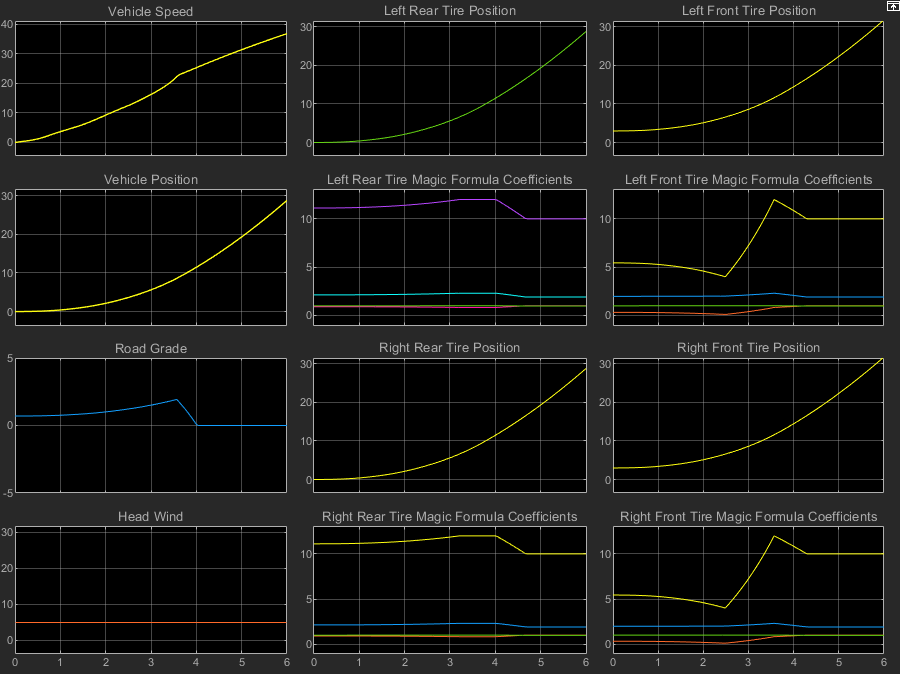
Скорость транспортного средства несколько увеличивается по мере снижения уровня дороги.
Чтобы проверить передний и задний дифференциалы в вариантах Open и Torsen, нажмите кнопку Test front, задний дифференциал.
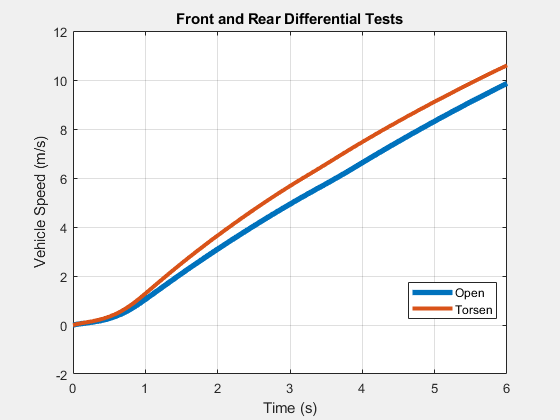
Дифференциальная конфигурация Торсена приводит к более высокой скорости во время моделирования.
Чтобы проверить все варианты дифференциала центра, щелкните Тестировать дифференциал центра.
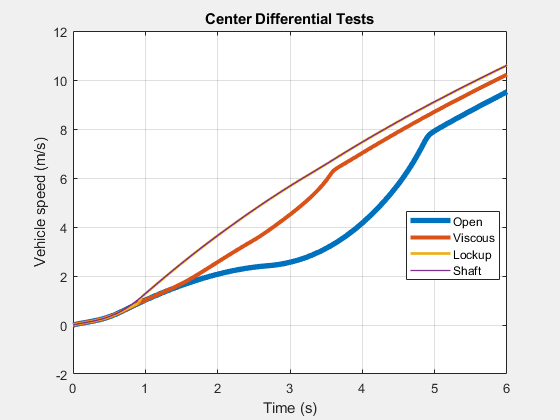
Открытые и вязкие дифференциальные конфигурации приводят к более низкой, более переменной скорости при изменении уклона во время моделирования.
Профиль дороги | Шина (с параметризацией трения) | Шина (магическая формула) | Взаимодействие шин и дорог (магическая формула) | Кузов транспортного средства
