Фиксированный угол между двумя осями Z рамы
Ограничения

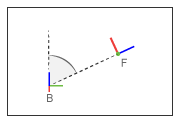
Этот блок применяет фиксированный угол между осями Z базовой рамы и рамы порта толкателя. Кадры теряют одну степень свободы вращения, если угол ограничения больше 0 ° и меньше 180 °. Они теряют две вращательные степени свободы, если угол ограничения равен ровно 0 ° или 180 °, то есть если кадры параллельны или антипараллельны. На рисунке показан угол зависимости между двумя кадрами.
Тип угловой зависимости. Значение по умолчанию: General.
| Напечатать | Цель |
|---|---|
Parallel | Выровняйте базовую и ведомую рамы + оси Z. |
Anti-Parallel | Выровняйте базовую рамку + ось Z по оси -Z ведомой рамы. |
Perpendicular | Сделайте оси Z основания и рамы толкателя перпендикулярными друг другу. |
General | Удерживайте заданный угол между осями Z базовой рамы и рамы порта толкателя. |
Угол зависимости между осями Z основания и рамы толкателя. Угол должен лежать в диапазоне от 0 до 180 °. 0 или 180 град., задайте для параметра Тип значение Parallel или Anti-Parallel вместо этого. Значение по умолчанию: 45 град.
Выберите, следует ли вычислять и выводить вектор крутящего момента зависимости расстояния и его величину. Крутящий момент ограничения расстояния - это крутящий момент, который должен быть приложен блоком для сохранения угла, заданного между базовой рамой и рамой порта толкателя.
Крутящие моменты ограничения действуют парами. Как выражается третьим законом движения Ньютона, если рамка порта основания оказывает ограничивающий крутящий момент на рамку порта толкателя, то рамка порта толкателя должна оказывать равный и противоположный крутящий момент на рамку порта основания. Выберите, какой из двух моментов ограничения требуется измерить:
Follower on Base - Определение момента ограничения, который рамка порта толкателя оказывает на рамку основного порта.
Base on Follower - Определение момента ограничения, который рамка базового порта оказывает на рамку порта толкателя.
Блок выражает вектор крутящего момента ограничения в виде его декартовых векторных компонентов. Разделение вектора на векторные компоненты известно как векторное разрешение. Кадр, оси которого определяют направления векторных компонентов, называется кадром разрешения. Выберите, следует ли разрешить вектор крутящего момента ограничения в основной рамке порта или в рамке порта толкателя.
Вычислите и выведите декартовы компоненты вектора крутящего момента зависимости угла. Выходной сигнал представляет собой трехмерный вектор с компонентами, выраженными вокруг осей X, Y и Z кадра разрешения.
Вычислите и выведите величину крутящего момента зависимости угла, включая его знак.
Блок обеспечивает два порта полки:
B - порт базовой полки
F - Порт рамы толкателя
Кроме того, блок обеспечивает два выходных порта физического сигнала:
t - вектор крутящего момента зависимости угла
tm - Подписанная величина крутящего момента ограничения угла
Зависимость конического зубчатого колеса | Зависимость общего зубчатого колеса | Инструментарий для глубокого обучения | Зависимость расстояния | Инструментарий глобальной оптимизации | Зависимость «Точка на кривой» | Зависимость стойки и шестерни | Инструментарий для обучения по усилению | ga (инструментарий глобальной оптимизации) | rlDDPGAgent(инструментарий для обучения по усилению)
