Моделирование динамики упрощенной трехфазной синхронной машины
Simscape / Электрический / Специализированные Энергосистемы / Электрические Машины
Блок упрощенной синхронной машины моделирует как электрические, так и механические характеристики простой синхронной машины.
Электрическая система для каждой фазы состоит из источника напряжения последовательно с импедансом RL, который реализует внутренний импеданс машины. Значение R может быть равно нулю, но значение L должно быть положительным.
Блок упрощенной синхронной машины реализует механическую систему, описанную
= Δλ (t) + λ 0,
где
Δλ = Изменение скорости в зависимости от скорости работы
H = постоянная инерции
Tm = механический крутящий момент
Te = электромагнитный момент
Kd = коэффициент демпфирования, представляющий влияние обмоток демпфера
λ (t) = механическая частота вращения ротора
start0 = скорость работы (1 шт.)
Хотя параметры могут быть введены либо в единицах СИ, либо в единицах измерения в диалоговом окне, внутренние вычисления выполняются в единицах измерения. На следующей блок-схеме показано, как реализуется механическая часть модели. Модель вычисляет отклонение относительно скорости работы; не сама абсолютная скорость.
Коэффициент демпфирования Kd моделирует эффект демпферных обмоток, обычно используемых в синхронных машинах. Когда машина подключена к бесконечной сети (нулевой импеданс), изменение угла дельта (δ) мощности машины, возникающее в результате изменения механической мощности (Pm), может быть аппроксимировано следующей передаточной функцией второго порядка:
2,
где
δ | Угол мощности дельта: угол внутреннего напряжения E относительно напряжения на клемме, в радианах |
Пополудни | Механическая мощность в pu |
ωn | Частота электромеханических колебаний = ) в рад/с |
ζ | Коэффициент демпфирования = startsHPmax ) |
ωs | Электрическая частота в рад/с |
Pmax | Максимальная мощность в pu, передаваемая через реактивное сопротивление X при напряжении Vt на клеммах и внутреннем напряжении E. Pmax = VtE/X, где Vt, E и X находятся в pu |
H | Постоянная (и) инерции |
Kd | Коэффициент демпфирования (pu_of_torque/ pu_of_speed) |
Эта приближенная передаточная функция, которая была выведена предположением sin (δ) = δ, действительна для малых углов мощности (δ < 30 градусов). Из приведенного выше выражения, что значение Kd, необходимое для получения заданного коэффициента демпфирования, следует:
4ζωsHPmax/2.
В библиотеке станков можно выбрать единицы СИ или блоки упрощенного синхронного станка для задания электрических и механических параметров модели. Эти два блока моделируют точно такую же упрощенную модель синхронной машины; единственное отличие заключается в том, как вводятся единицы измерения параметров.
Укажите количество проводов, используемых в трехфазном Y-соединении: трехпроводные (нейтраль недоступна) или четырехпроводные (нейтраль доступна). По умолчанию: 3-wire Y.
Выберите механическую мощность, применяемую к валу или частоте вращения ротора, в качестве входного сигнала Simulink ® для блока или для представления вала машины с помощью Simscape™ вращательного механического порта.
Выбрать Mechanical power Pm (по умолчанию) для задания ввода механической мощности в W или pu и изменения метки ввода блока на Pm. Скорость машины определяется инерцией J машины (или постоянной Н инерции для машины pu) и разницей между механическим крутящим моментом Tm, возникающим в результате приложенной механической мощности Pm, и внутренним электромагнитным крутящим моментом Те. Условное обозначение механической мощности - когда скорость положительная, положительный сигнал механической мощности указывает режим генератора, а отрицательный сигнал указывает режим двигателя.
Выбрать Speed w для задания ввода скорости, в рад/с или в пу, и изменения метки ввода блока на w. Скорость машины накладывается и механическая часть модели (постоянная инерции H) игнорируется. Использование скорости в качестве механического ввода позволяет моделировать механическую связь между двумя машинами.
На следующем рисунке показано, как моделировать жесткое соединение вала в двигателе-генераторе, когда крутящий момент трения игнорируется в машине 2. Выход скорости машины 1 (двигателя) соединен с входом скорости машины 2 (генератора), а выход электромагнитного крутящего момента машины 2 Те подается на вход механического крутящего момента Tm машины 1. Коэффициент Kw учитывает единицы скорости обеих машин (pu или рад/с) и передаточное число коробки передач w2/w1. Коэффициент KT учитывает единицы крутящего момента как машин (pu или N.m), так и номинальные параметры машин. Кроме того, поскольку J2 инерции игнорируется в машине 2, J2, относящиеся к скорости машины 1, должны быть добавлены к J1 инерции машины 1.
Выбрать Mechanical rotational port для добавления к блоку механического поворотного порта Simscape, который позволяет соединять вал машины с другими блоками Simscape, имеющими механические поворотные порты. Входной сигнал Simulink, представляющий механическую мощность Pm или скорость w машины затем извлекают из блока.
На следующем рисунке показано, как подключить блок источника идеального крутящего момента из библиотеки Simscape к валу машины, чтобы представить машину в режиме двигателя или в режиме генератора, когда частота вращения ротора положительная.
Если этот флажок установлен, на выходе измерения используются имена сигналов для идентификации меток шины. Эта опция используется для приложений, для которых метки сигналов шины должны содержать только буквенно-цифровые символы. Значение по умолчанию очищено.
Если флажок снят, на выходе измерения используется определение сигнала для идентификации меток шины. Метки содержат неальфанумерные символы, несовместимые с некоторыми приложениями Simulink.
Номинальная кажущаяся мощность Pn (VA), частота fn (Гц) и среднеквадратичное напряжение Vn (V). Вычисляет номинальный крутящий момент и преобразует единицы СИ в pu. По умолчанию: [187e6 13800 60].
Коэффициент инерции (J в кгм2 или H в секундах) демпфирования (Kd) и число пар полюсов (p). Коэффициент демпфирования должен быть указан в (pu крутящего момента )/( pu скорости) в обоих диалоговых окнах машины (в pu и в SI). По умолчанию: [3.7 0 20] для pu и [3.895e6 0 20] для СИ.
Сопротивление R (Λ или pu) и реактивное сопротивление L (H или pu) для каждой фазы. По умолчанию: [0.02 0.3] для pu и [0.0204 0.8104e-3] для СИ.
Начальное отклонение скорости (% от номинального), угол ротора (градусы), значения линейного тока (A или pu) и фазовые углы (градусы). Эти значения автоматически вычисляются утилитой потока нагрузки блока Powergui. По умолчанию: [ 0,0 0,0,0 0,0,0 ].
Указывает время выборки, используемое блоком. Чтобы наследовать время выборки, указанное в блоке Powergui, задайте для этого параметра значение −1. По умолчанию: −1.
Чтобы включить вкладку Дополнительно (Advanced), установите для параметра Тип моделирования (Simulation type) блока powergui значение Дискретный (Discretic) и на вкладке Настройки (Preferences) снимите флажки Автоматически обрабатывать дискретный решатель (Automatically handle district solver) и Дополнительно (Advanced) для параметра Решатель блоков (Blocks)
Задает метод интеграции, используемый блоком. Выбор: Trapezoidal non iterative(по умолчанию), Trapezoidal robust, и Backward Euler robust.
При выборе параметров Автоматически обрабатывать дискретный решатель и Дополнительные настройки решателя блоков в блоке powergui для модели дискретного решателя автоматически устанавливается значение Trapezoidal robust.
Trapezoidal non iterative требуется добавить незначительную шунтирующую нагрузку на клеммы станка для поддержания стабильности моделирования, и моделирование может не сойтись и остановиться при увеличении количества станков в модели.
Trapezoidal robust и Backward Euler robust позволяют исключить необходимость использования паразитных нагрузок. Для исключения топологических ошибок машин, подключенных к индуктивной цепи (например, автоматический выключатель, соединенный последовательно с машиной), машина моделирует ничтожную внутреннюю нагрузку 0.01% номинальной мощности.
Trapezoidal robust несколько точнее, чем Backward Euler robust, особенно когда модель моделируется в большее время выборки. Trapezoidal robust может создавать небольшие демпфированные числовые колебания напряжения машины в условиях холостого хода, в то время как Backward Euler robust предотвращает колебания и поддерживает точность.
Дополнительные сведения о том, какой метод следует использовать в приложении, см. в разделе Моделирование дискретизированных электрических систем.
Указывает время выборки, используемое блоком. Чтобы наследовать время выборки, указанное в блоке powergui, установите для этого параметра значение -1 (по умолчанию).
Параметры потока нагрузки определяют параметры блока для использования с инструментом «Поток нагрузки» блока Powergui. Эти параметры потока нагрузки предназначены только для инициализации модели. Они не влияют ни на модель блока, ни на производительность моделирования.
Конфигурация вкладки Поток нагрузки (Load Flow) зависит от опции, выбранной для параметра Тип генератора (Generator type).
Укажите тип генератора машины.
Выбрать swing для реализации генератора, управляющего величиной и фазовым углом его клеммного напряжения. Величина и угол опорного напряжения определяются параметрами напряжения шины Swing или шины PV и угла напряжения шины Swing блока шины Load Flow, подключенного к клеммам машины.
Выбрать PV (по умолчанию) для реализации генератора, контролирующего его выходную активную мощность P и величину напряжения V.P, задают параметром Active power generation P блока. V определяется параметром напряжения шины качания или шины PV блока шины потока нагрузки, подключенного к клеммам машины. Минимальную и максимальную реактивную мощность, генерируемую блоком, можно контролировать с помощью параметров Минимальная реактивная мощность Qmin и Максимальная реактивная мощность Qmax.
Выбрать PQ для реализации генератора, управляющего его выходной активной мощностью P и реактивной мощностью Q. P и Q задаются параметрами активной выработки мощности P и реактивной выработки мощности Q блока соответственно.
Укажите активную мощность, генерируемую машиной, в ваттах. При работе машины в режиме двигателя указывается отрицательное значение. Этот параметр доступен, если тип генератора указан как PV или PQ. По умолчанию: 0.
Укажите реактивную мощность, которая должна генерироваться машиной, в vars. Отрицательное значение указывает, что реактивная мощность поглощается машиной. Этот параметр доступен только в том случае, если тип генератора указан как PQ. По умолчанию: 0.
Этот параметр доступен только в том случае, если тип генератора указан как PV. Указывает минимальную реактивную мощность, которая может быть сгенерирована машиной при поддержании напряжения на клемме на ее опорном значении. Это опорное напряжение определяется параметром напряжения шины качания или шины PV блока шины потока нагрузки, подключенного к клеммам машины. Значение по умолчанию: -inf, что означает отсутствие нижнего предела на выходе реактивной мощности. По умолчанию: -inf.
Этот параметр доступен только в том случае, если тип генератора указан как PV. Указывает максимальную реактивную мощность, которая может быть сгенерирована машиной при поддержании напряжения на клемме на ее опорном значении. Это опорное напряжение определяется параметром напряжения шины качания или шины PV блока шины потока нагрузки, подключенного к клеммам машины. Значение по умолчанию: +inf, что означает отсутствие верхнего предела на выходе реактивной мощности. По умолчанию: +inf.
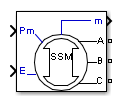
PmМеханическая мощность, подаваемая в машину, в ваттах. Вход может быть постоянным сигналом или может быть подключен к выходу блока гидравлической турбины и регулятора. Частота внутренних источников напряжения зависит от механической скорости машины.
wВход альтернативного блока вместо Pm (в зависимости от значения параметра Mechanical input) - скорость машины в рад/с.
EАмплитуда внутренних напряжений блока. Это может быть постоянный сигнал или он может быть подключен к выходу регулятора напряжения. Если используется машина единиц СИ, этот вход должен быть в вольтах фаза-фаза RMS. Если вы используете машину pu units, она должна быть в pu.
mВыход Simulink блока представляет собой вектор, содержащий сигналы измерения. Демультиплексировать эти сигналы можно с помощью блока выбора шины, предоставленного в библиотеке Simulink. В зависимости от типа используемой маски единицы измерения находятся в SI или в pu.
Имя | Определение | Единицы |
|---|---|---|
МСФО | Ток статора is_a | A или pu |
ibs | Ток статора is_b | A или pu |
ics | Ток статора is_c | A или pu |
va | Напряжение на клеммах Va | V или pu |
vb | Напряжение на клеммах Vb | V или pu |
vc | Напряжение на клеммах Vc | V или pu |
EA | Внутреннее напряжение Ea | V или pu |
eb | Внутреннее напряжение Eb | V или pu |
ЕС | Внутреннее напряжение Ec | V или pu |
тета | Угол ротора тета | радиус |
w | Частота вращения ротора wm | рад/с |
Pe | Электрическая мощность Pe | W |
Электрическая система блока упрощенной синхронной машины состоит исключительно из источника напряжения за синхронным реактивным сопротивлением и сопротивлением. Все остальные само- и намагничивающиеся индуктивности якоря, поля и демпфирующих обмоток игнорируются. Эффект обмоток демпфера аппроксимируется коэффициентом демпфирования Kd. Три источника напряжения и ветви полного сопротивления RL соединены по оси Y (три провода или четыре провода). Нагрузка может быть сбалансирована или не сбалансирована.
При использовании блоков Simplified Synchronous Machine в дискретных системах может потребоваться небольшая паразитная резистивная нагрузка, подключенная к клеммам машины, чтобы избежать числовых колебаний. Большие времена выборки требуют больших нагрузок. Минимальная резистивная нагрузка пропорциональна времени выборки. Помните, что с шагом времени 25 мкс в системе с частотой 60 Гц минимальная нагрузка составляет приблизительно 2,5% от номинальной мощности машины. Например, упрощенная синхронная машина 200 МВА в энергосистеме, дискретизированная с временем выборки 50 мкс, требует приблизительно 5% резистивной нагрузки или 10 МВт. Если время выборки уменьшено до 20 мкс, достаточно резистивной нагрузки 4 МВт.
power_simplealt В примере используется блок упрощенной синхронной машины для представления эквивалентного источника 1000 МВА, 315 кВ, 60 Гц, подключенного к бесконечной шине (трехфазный программируемый источник напряжения). Блок упрощенной синхронной машины (SI Units) используется в качестве синхронного генератора. Внутреннее сопротивление и реактивное сопротивление устанавливают соответственно 0,02 pu (1,9845 Ом) и 0,2 pu (X = 19,845 Ом; L = 0,0526 Н). Инерция машины равна J = 168 870 кг.м2, что соответствует постоянной инерции H = 3. Электрическая частота равна Машина имеет две пары полюсов, так что её синхронная скорость равна 2 * λ * 60/2 = 188,5 рад/с или 1800 об/мин.
Опция Load Flow на Powergui была использована для инициализации машины, чтобы начать моделирование в установившемся состоянии с машиной, генерирующей 500 МВт. Требуемое внутреннее напряжение, вычисленное потоком нагрузки, составляет 1,0149 pu. Поэтому внутреннее напряжение E = 315e3 * 1,0149 = 319 690 Vrms фаза-фаза задается в блоке константы, подключенном к входу E. Максимальная мощность, которая может подаваться машиной с напряжением на клеммах Vt = 1,0 pu и внутренним напряжением E = 1,0149 pu, составляет Pmax = Vt * E/X = 1,0149/0,2 = 5,0745 pu.
Фактор демпфирования Kd приспособлен, чтобы получить отношение демпфирования ζ = 0.3. Требуемое значение Kd:
64,3
Два блока Фурье измеряют угол δ мощности. Этот угол вычисляется как разность между фазовым углом внутреннего напряжения фазы А и фазовым углом конечного напряжения фазы А.
В этом примере выполняется шаг по механической мощности, приложенной к валу. Машина изначально работает в установившемся состоянии с механической мощностью 505 МВт (механическая мощность, необходимая для выходной электрической мощности 500 МВт, с учетом резистивных потерь). При t = 0,5 с механическая мощность внезапно увеличивается до 1000 МВт.
Запустите пример и просмотрите электромеханический переходный процесс на блоке Scope, отображающем угол мощности δ в градусах, скорость машины в об/мин и электрическую мощность в МВт.
Для исходной электрической мощности Pe = 500 МВт (0,5 pu) угол нагрузки δ равен 5,65 градуса, что соответствует ожидаемому значению:
p.u.
По мере того, как механическая мощность становится ступенчатой от 0,5 pu до 1,0 pu, угол нагрузки увеличивается и проходит через ряд под демпфированием колебаний (коэффициент демпфирования («damping») («damping») = 0,3) перед стабилизацией до его нового значения 11,3 градуса. Частота колебаний задается:
Гц.
Система возбуждения, гидравлическая турбина и регулятор, Power ergui, паровая турбина и регулятор, синхронная машина SI основной, синхронная машина pu основной, синхронная машина pu стандарт
