Несмотря на то, что библиотека Electric Drives содержит модели моторных приводов, широко используемых в отрасли, могут возникнуть некоторые особые требования, ведущие к созданию собственной модели моторного привода. Ниже приведена информация о построении модели привода двигателя с использованием блоков Simulink ® и Simscape™ Electrical™ Specialized Power Systems. Вы создадите моторный привод с ориентацией на поле, очень похожий на модель AC3. На следующем рисунке показана блок-схема диска.
Полевой асинхронный электропривод переменной частоты
Питание асинхронного двигателя осуществляется ШИМ-инвертором, который работает как трехфазный синусоидальный источник тока. Для получения команды Te * на крутящий момент определяют, сравнивают ли частоту λ вращения двигателя с эталонной, а ошибку обрабатывают регулятором частоты вращения.
Как показано ниже, поток ротора и крутящий момент могут отдельно управляться токами постоянной оси статора ids и квадратурной осью iqs соответственно.
Принцип управления с ориентацией на поле
Математические принципы этого привода переменного тока были обсуждены в библиотеке электрических приводов. Здесь мы будем только переписывать основные уравнения. Эталон квадратурного тока статора iqs * рассчитывается по эталону крутящего момента Te * как
где Lr - индуктивность ротора, Lm - взаимная индуктивность, а |
где startr = Lr/Rr - постоянная времени ротора.
Эталон тока по прямой оси статора ids * получают из эталонного входа потока ротора | startr | *.
| * Lm
При этом требуемое для преобразования координат положение Λ e потока ротора генерируют из частоты, определяемой частотой, определяемой скоростью и частотой проскальзывания λ sl ротора.
) дт
Частота проскальзывания рассчитывается по опорному току статора iqs * и параметрам двигателя.
*
Привязки тока iqs * и ids * преобразуются в привязки тока фазы ia *, ib *, ic * для регуляторов тока. Регуляторы обрабатывают измеренный и опорный токи для получения сигналов стробирования инвертора.
Роль регулятора скорости состоит в том, чтобы поддерживать скорость двигателя равной опорной скорости, введенной в установившемся состоянии, и обеспечивать хорошую динамику во время переходных процессов. Контроллер может быть пропорционально-интегрального типа.
Откройте окно power_acdrive модель и сохраните ее как case3 в рабочей папке, чтобы можно было вносить дальнейшие изменения без изменения исходного файла.
На следующем рисунке показаны power_acdrive модель, в которой блоки из библиотек Simscape Electrical Specialized Power Systems и Simulink используются для моделирования привода асинхронного двигателя.
Векторное управление электроприводом переменного тока (power_acdrive)
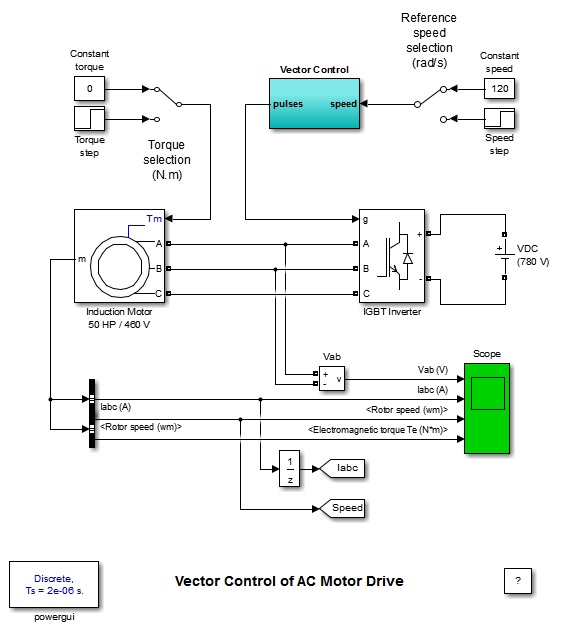
Асинхронный двигатель моделируется блоком асинхронной машины. Двигатель, используемый в данном примере, представляет собой двигатель 50 л.с., 460 В, четырехполюсник, 60 Гц, имеющий следующие параметры:
RS |
|
Lls |
|
Lm |
|
RR |
|
Llr |
|
Контрольная скорость и крутящий момент нагрузки, приложенный к валу двигателя, могут быть выбраны блоком ручного переключения для использования либо постоянного значения, либо ступенчатой функции. Первоначально контрольная скорость устанавливается на постоянное значение 120 рад/с, и крутящий момент нагрузки также поддерживается постоянным на уровне 0 Н· м
Ориентированное на поле управление моделируется блоком управления вектором, как показано в разделе Управление вектором привода двигателя переменного тока (power_acdrive). Этот блок состоит из блоков Simulink, показанных на следующем рисунке.
Блок управления вектором
Инвертор IGBT моделируется блоком универсального моста, в котором опции конфигурации Power Electronic device и Port выбраны как IGBT/Diode и ABC в качестве выходных выводов соответственно. Входное напряжение линии постоянного тока представлено источником постоянного напряжения 780 В.
Регулятор тока состоит из трех контроллеров гистерезиса и построен с блоками Simulink. Токи двигателя обеспечиваются измерительным выходом блока асинхронной машины.
Преобразования между abc и dq опорными кадрами выполняются блоками abc_to_dq0 Transformation и dq0_to_abc Transformation
abc_dq
dq_abc
Поток ротора вычисляется блоком Flux_Calculation.
Положение потока ротора вычисляется посредством вычисления тета в блоке управления вектором. Частота вращения двигателя обеспечивается измерительным выходом блока асинхронной машины.
Отсчет тока по квадратурной оси статора (iqs *) вычисляется блоком iqs * _ Calculation.
Привязка тока по прямой оси статора (ids *) вычисляется блоком id * _ Calculation.
Регулятор скорости является пропорционально-интегральным и реализован с использованием блоков Simulink.
Для увеличения скорости моделирования эта модель дискретизируется с использованием времени выборки 2 мкс. Переменная Ts = 2e-6 автоматически загружается в рабочую область при открытии этой модели. Это время Ts выборки используется как для цепи питания (Ts указано в Powergui) и системой управления.
Запустите моделирование.
Сигналы напряжения и тока двигателя, а также частота вращения и крутящий момент двигателя отображаются на четырех осях области действия, связанных с переменными Vab, Iabc, startm и Te.
Можно запустить диск, указав [1,0,0,0,0,0,0,0] в качестве начальных условий для блока асинхронной машины (начальное проскальзывание = 1 и отсутствие токов, протекающих в трех фазах). Опорная скорость составляет 120 рад/с.
Скорость двигателя, электромеханический крутящий момент и токи, наблюдаемые во время запуска привода асинхронного двигателя, показаны в разделе Запуск привода асинхронного двигателя.
Обратите внимание, что можно сохранить вектор конечного состояния системы и использовать его в качестве начального состояния в последующем моделировании, чтобы моделирование могло начаться в установившихся условиях.
Запуск привода асинхронного двигателя
После достижения устойчивого состояния можно остановить моделирование и увеличить масштаб сигналов области.
На этом рисунке показаны сигналы напряжения, тока и крутящего момента двигателя, полученные, когда двигатель работает без нагрузки (крутящий момент = 0 Н· м) со скоростью 120 рад/с.
Полоса 20 А, введенная регулятором гистерезисного тока, хорошо видна на трех токах двигателя.
Стационарные сигналы тока, напряжения и крутящего момента двигателя
Вы можете изучить динамические характеристики привода (характеристики регулирования скорости по сравнению с изменениями эталонного крутящего момента и крутящего момента нагрузки), применив к приводу два изменяющихся рабочих условия: ступенчатое изменение эталонной скорости и ступенчатое изменение нагрузочного крутящего момента.
Используйте переключатель выбора эталонной скорости и переключатель выбора крутящего момента, чтобы установить эталонные шаги скорости от 120 рад/с до 160 рад/с при t = 0,2 с и шаги крутящего момента нагрузки от 0 Н.м до 200 Н.м при t = 1,8 с. Вектор конечного состояния, полученный при предыдущем моделировании, можно использовать в качестве исходного условия, чтобы моделирование начиналось с установившегося состояния. Загрузить power_acdrive_init.mat , который создает xInitial переменная. На вкладке Моделирование (Simulation) щелкните Параметры модели (Model Settings). Выберите Импорт/экспорт данных. Выберите Начальное состояние и нажмите кнопку OK. Перезапустите моделирование.
Здесь показана реакция привода асинхронного двигателя на последовательные изменения опорной скорости и крутящего момента нагрузки.
Динамические характеристики привода асинхронного двигателя
[1] Леонгард, В., управление электроприводами, Спрингер-Верлаг, Берлин, 1996.
[2] Мерфи, Дж. М. Д., и Тернбулл, Ф. Г., Power Electronic Control of AC Motors, Pergamon Press, Оксфорд, 1985.
[3] Бозе, Б. К., Силовая электроника и приводы переменного тока, Прентис-Холл, Энглвуд Клиффс, Нью-Джерси, 1986.
