Пятифазный синхронный двигатель постоянного магнита с синусоидальным распределением потока
Simscape/Электрический/Электромеханический/Постоянный магнит
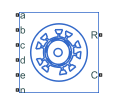
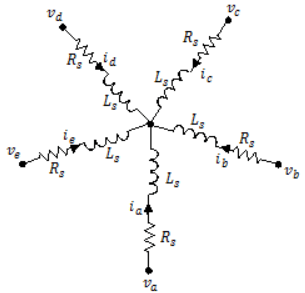
Блок PMSM (пятифазный) моделирует синхронный двигатель постоянного магнита со статором с пятифазной звездой. На рисунке показана эквивалентная электрическая цепь для обмоток статора со звездой.
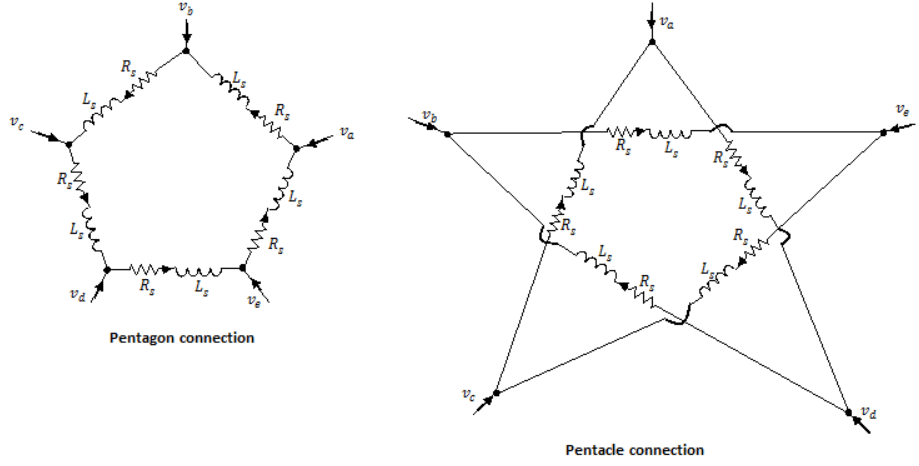
Можно также моделировать синхронный двигатель с постоянным магнитом в конфигурации с пятиугольным или пятиугольным ранцем, установив для параметра Тип обмотки значение Pentagon-wound или Pentacle-wound.
На этом рисунке показана конструкция двигателя с одной полюсной парой на роторе.
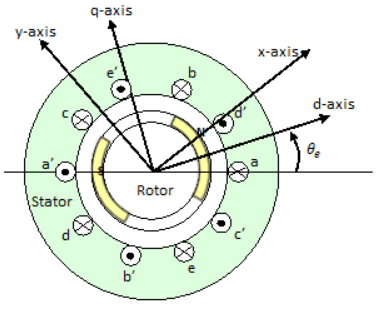
Постоянные магниты создают магнитное поле ротора, создающее синусоидальную скорость изменения потока с углом ротора.
Для условных осей, показанных на предыдущем чертеже, потоки α - фазы и постоянного магнита выравниваются при нулевом механическом угле λ r ротора. Блок поддерживает определение второй оси ротора, в котором механический угол ротора определяется как угол между α - фазной магнитной осью и q-осью ротора.
Напряжения на обмотках статора определяются:
где:
va, vb, vc, vd и ve - индивидуальные фазные напряжения на обмотках статора.
Rs - эквивалентное сопротивление каждой обмотки статора.
ia, ib, ic, id и ie - токи, протекающие в обмотках статора.
и - скорости изменения магнитного потока в каждой обмотке статора.
Постоянный магнит и пять обмоток вносят вклад в общий поток, связывающий каждую обмотку. Общий поток определяется следующим образом:
[
где:
в качестве общих потоков, связывающих каждую обмотку статора.
Laa, Lbb, Lcc, Ldd и Lee являются самоиндукциями обмоток статора.
Lab, Lac, Lba и так далее являются взаимными индуктивами обмоток статора.
В качестве потоков постоянных магнитов, связывающих обмотки статора, используются, по меньшей мере, в качестве потоков постоянных магнитов.
Индуктивности в обмотках статора являются функциями электрического угла ротора, определяемого:
смещение ротора
2starte),
2δ/5)),
4δ/5)),
(
(
(2
2
Lmcos (2
2
(2
2
и
2
где:
startr - механический угол ротора.
starte - электрический угол ротора.
смещение ротора - pi/2 если вы определяете электрический угол ротора относительно оси d, или 0 при определении электрического угла ротора относительно оси q.
Ls - однофазная самоиндукция статора. Это значение представляет собой среднюю самоиндуктивность каждой из обмоток статора.
Lm - флуктуация индуктивности статора. Это значение является флуктуацией собственной индуктивности и взаимной индуктивности с изменением угла ротора.
Ms - взаимная индуктивность статора. Это значение представляет собой среднюю взаимную индуктивность между обмотками статора.
Поток постоянного магнита, связывающий обмотку a-a ', находится на максимуме, когда (е) = 0 °, и нуле, когда (е) = 90 °. Поэтому связанный поток двигателя определяется следующим образом:
),,,,,
где groupm - связь постоянного магнитного потока.
Чтобы снять зависимость угла ротора для индуктивных членов, необходимо выполнить преобразование T для уравнений двигателя.
Т-преобразование определяется следующим образом:
((,
где starte - электрический угол, определяемый как Nstartr. N - число пар полюсов.
Матрица преобразования имеет следующее псевдо-ортогональное свойство:
(starte).
С помощью Т-преобразования на обмотке статора напряжения и токи преобразуют их в кадры dq0 и xy, не зависящие от угла ротора:
vavbvcvdve]
и
iaibicidie].
Применение этого преобразования к первым двум электрическим уравнениям приводит к следующим уравнениям, которые определяют поведение блока:
NstartiqsLq,
,
Lddixdt,
Lddydt,
и
idsiqsLq),
где:
Ld = Ls + Ms + 5/2 Lm. Ld - индуктивность d-оси статора.
Lq = Ls + Ms − 5/2 Lm. Lq - индуктивность по оси q статора.
L0 = Ls - 4Ms. L0 - индуктивность нулевой последовательности статора.
λ - механическая частота вращения ротора.
N - число пар полюсов постоянных магнитов ротора.
Можно параметризовать двигатель с помощью обратной ЭДС или постоянных крутящего момента, которые чаще всего задаются на листах данных двигателя, с помощью опции «Связь постоянного магнитного потока».
Обратная постоянная ЭДС определяется как пиковое напряжение, индуцированное постоянным магнитом в каждой из фаз на единицу скорости вращения. Он связан с пиковой связью постоянного магнитного потока посредством:
Nλ м.
Из этого определения следует, что обратная ЭДС, eph, для одной фазы задается следующим образом:
кеом.
Постоянная крутящего момента определяется как пиковый крутящий момент, индуцированный каждым из фаз на единицу тока. Она численно идентична по значению обратной постоянной ЭДС, когда обе выражены в единицах СИ:
N, м.
Когда Ld = Lq, и когда токи во всех пяти фазах сбалансированы, то суммарный крутящий момент T задается:
52ktIpk,
где Ipk - пиковый ток в любой из трех обмоток.
Коэффициент 5/2 рассчитывается из установившейся суммы моментов всех фаз. Поэтому постоянная крутящего момента kt также может быть определена как:
TIpk),
где T - измеренный суммарный крутящий момент при испытании сбалансированным трехфазным током с пиковым линейным напряжением Ipk. Среднеквадратичное напряжение измеряется следующим образом:
среднеквадратичное значение).
Параметры «Переменные» используются для задания приоритетов и начальных целевых значений для переменных блока перед моделированием. Дополнительные сведения см. в разделе Установка приоритета и начальной цели для переменных блока.
[1] Л. Парса и Х. А. Толият. Управление прямым крутящим моментом без сенсора пятифазных внутренних электродвигателей постоянного магнита. Транзакции IEEE по отраслевым приложениям, том 43, № 4, стр. 952-959, июль-август 2007 г.
[2] Андерсон, П. М. Анализ неисправных энергосистем. IEEE Press Power Systems Engineering Series, 1995. ISBN 0-7803-1145-0.
