Синхронный двигатель постоянного магнита с синусоидальным распределением потока
Simscape/Электрический/Электромеханический/Постоянный магнит
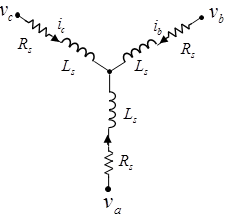
Блок PMSM моделирует синхронный двигатель с постоянным магнитом с трехфазным статором с намоткой. На рисунке показана эквивалентная электрическая цепь для обмоток статора.
Для этого блока можно выбрать различные встроенные параметры. Дополнительные сведения см. в разделе Предопределенная параметризация.
На этом рисунке показана конструкция двигателя с одной полюсной парой на роторе.
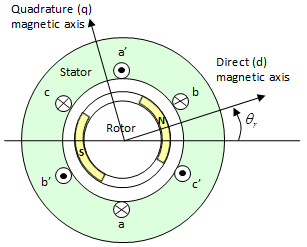
Постоянные магниты создают магнитное поле ротора, создающее синусоидальную скорость изменения потока с углом ротора.
Для условных осей, показанных на предыдущем чертеже, потоки α - фазы и постоянного магнита выравниваются при нулевом механическом угле Блок поддерживает определение второй оси ротора, в котором механический угол ротора определяется как угол между α - фазной магнитной осью и q-осью ротора.
Напряжения на обмотках статора определяются:
d
где:
va, vb и vc - индивидуальные фазные напряжения на обмотках статора.
Rs - эквивалентное сопротивление каждой обмотки статора.
ia, ib и ic - токи, протекающие в обмотках статора.
В качестве скорости изменения магнитного потока в каждой обмотке статора используются d
Постоянный магнит и три обмотки вносят вклад в общий поток, связывающий каждую обмотку. Общий поток определяется следующим образом:
[
где:
в качестве общих потоков, связывающих каждую обмотку статора.
Laa, Lbb и Lcc являются самоиндукциями обмоток статора.
Lab, Lac, Lba и так далее являются взаимными индуктивами обмоток статора.
В качестве потоков постоянного магнита, связывающих обмотки статора, используются, в частности, потоки постоянного магнита.
Индуктивности в обмотках статора являются функциями электрического угла ротора, определяемого:
смещение ротора
2starte),
2δ/3)),
(
(
(
и
(
где:
startr - механический угол ротора.
starte - электрический угол ротора.
смещение ротора - 0 если вы определяете электрический угол ротора относительно оси d, или -pi/2 при определении электрического угла ротора относительно оси q.
Ls - самоиндуктивность статора на фазу. Это значение представляет собой среднюю самоиндуктивность каждой из обмоток статора.
Lm - флуктуация индуктивности статора. Это значение является флуктуацией собственной индуктивности и взаимной индуктивности с изменением угла ротора.
Ms - взаимная индуктивность статора. Это значение представляет собой среднюю взаимную индуктивность между обмотками статора.
Поток постоянного магнита, связывающий обмотку а, является максимальным, когда (e) = 0 °, и нулевым, когда (e) = 90 °. Поэтому связанный поток двигателя определяется следующим образом:
[((
где groupm - связь постоянного магнитного потока.
Применение преобразования Парка к электрическим уравнениям блока создает выражение для крутящего момента, которое не зависит от угла ротора.
Трансформация парка определяется:
((,,
где starte - электрический угол, определяемый как Nstartr. N - число пар полюсов.
С помощью преобразования Пак на обмотке статора напряжения и токи преобразуют их в кадр dq0, который не зависит от угла ротора:
vavbvc]
и
iaibic].
При применении преобразования Парка к первым двум электрическим уравнениям формируются следующие уравнения, определяющие поведение блока:
NstartiqLq,
,
и
idiqLq),
где:
Ld = Ls + Ms + 3/2 Lm. Ld - индуктивность d-оси статора.
Lq = Ls + Ms − 3/2 Lm. Lq - индуктивность по оси q статора.
L0 = Ls - 2Ms. L0 - индуктивность нулевой последовательности статора.
λ - механическая частота вращения ротора.
N - число пар полюсов постоянных магнитов ротора.
T - крутящий момент ротора. Крутящий момент течет от корпуса двигателя (физический порт C блока) к ротору двигателя (физический порт R блока).
Блок PMSM использует исходную неоргональную реализацию преобразования Park. При попытке применить альтернативную реализацию получаются разные результаты для напряжения и токов dq0.
Можно параметризовать двигатель с помощью обратной ЭДС или постоянных крутящего момента, которые чаще всего задаются на листах данных двигателя, с помощью опции «Связь постоянного магнитного потока».
Обратная постоянная ЭДС определяется как пиковое напряжение, индуцированное постоянным магнитом в каждой из фаз на единицу скорости вращения. Он связан с пиковой связью постоянного магнитного потока посредством:
Nλ м.
Из этого определения следует, что обратная EMF eph для одной фазы задается следующим образом:
кеом.
Постоянная крутящего момента определяется как пиковый крутящий момент, индуцированный каждой из фаз на единицу тока. Она численно идентична по значению обратной постоянной ЭДС, когда обе выражены в единицах СИ:
N, м.
Когда Ld = Lq, и когда токи во всех трех фазах сбалансированы, то суммарный крутящий момент T задается:
32ktIpk,
где Ipk - пиковый ток в любой из трех обмоток.
Из этого следует, что коэффициент 3/2 является установившейся суммой моментов всех фаз. Поэтому постоянная крутящего момента kt также может быть определена как:
TIpk),
где T - измеренный суммарный крутящий момент при испытании сбалансированным трехфазным током с пиковым линейным напряжением Ipk. Запись в терминах тока строки RMS:
среднеквадратичное значение.
Потери железа делятся на два члена, один из которых представляет основную траекторию намагничивания, а другой - поперечную траекторию острия зуба, которая становится активной во время работы с ослабленным полем. Модель потерь железа, которая основана на творчестве Меллера [3].
Термин, представляющий основной путь намагничивания, зависит от индуцированного среднеквадратичного напряжения статора от линии до нейтрали, :
aexk1.5Vmrms1.5
Это доминирующий термин при работе без нагрузки. k - обратная постоянная ЭДС, относящаяся к среднеквадратичным вольтам на Гц. Определяется как Vmrms/f, где f - электрическая частота. Первый член с правой стороны - магнитные гистерезисные потери, второй - вихревые токовые потери и третий - избыточные потери. Три коэффициента, отображаемые на числителях, получаются из значений, которые предоставляются для гистерезиса с разомкнутым контуром, вихревых и избыточных потерь.
Термин, представляющий траекторию поперечной вершины зуба, становится важным, когда установлено поле размагничивания, и может быть определен из теста короткого замыкания на конечно-элементный анализ. Это зависит от среднеквадратичного значения, связанного с потоком наконечника поперечного зуба, *:
bexk1.5Vdrms * 1,5
Три числительных члена получаются из значений, которые вы предоставляете для гистерезиса короткого замыкания, вихревых и избыточных потерь.
Для блока PMSM имеется несколько встроенных параметров.
Эти данные предварительной параметризации позволяют настроить блок для представления компонентов определенными поставщиками. Параметры этих синхронных двигателей с постоянными магнитами соответствуют листам технических данных производителя. Чтобы загрузить предопределенную параметризацию, щелкните гиперссылку «Выбор предопределенной параметризации» в маске блока PMSM и выберите деталь, которую требуется использовать, из списка доступных компонентов.
Примечание
Предопределенные параметризации компонентов Simscape используют доступные источники данных для предоставления значений параметров. Для заполнения недостающих данных используются инженерные суждения и упрощающие допущения. В результате следует ожидать отклонения между моделируемым и фактическим физическим поведением. Для обеспечения требуемой точности необходимо проверить смоделированное поведение на соответствие экспериментальным данным и при необходимости уточнить модели компонентов.
Блок имеет четыре дополнительных тепловых порта, по одному для каждой из трех обмоток и по одному для ротора. По умолчанию эти порты скрыты. Чтобы открыть тепловые порты, щелкните правой кнопкой мыши блок в модели, выберите Simscape > Block choices, а затем выберите требуемый вариант блока с тепловыми портами: Composite theral-phase ports | Show thermal port или Expanded threase-phase ports | Show thermal port. Это действие отображает тепловые порты на значке блока и отображает параметры Температурная зависимость (Temperature Dependence) и Тепловой порт (Thermal Port). Эти параметры описаны далее на этой справочной странице.
Используйте тепловые порты для моделирования влияния сопротивления меди и потерь железа, которые преобразуют электроэнергию в тепло. Дополнительные сведения об использовании тепловых портов в блоках привода см. в разделе Моделирование тепловых эффектов во вращательных и поступательных приводах.
Параметры «Переменные» используются для задания приоритетов и начальных целевых значений для переменных блока перед моделированием. Дополнительные сведения см. в разделе Установка приоритета и начальной цели для переменных блока.
[1] Kundur, P. Стабильность и управление энергосистемой. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Андерсон, П. М. Анализ неисправных энергосистем. Хобокен, Нью-Джерси: Wiley-IEEE Press, 1995.
[3] Меллер, П. Х., Р. Вробель и Д. Холлидей. «Вычислительно эффективная модель потерь железа для бесщеточных машин переменного тока, которая обеспечивает номинальный поток и ослабленную работу в полевых условиях». Конференция по электрическим машинам и приводам IEEE. Май 2009 года.




