Синхронная машина дискретного или непрерывного времени ST4C система статического возбуждения с автоматическим регулятором напряжения
Управление Simscape/Electrical/Control/SM
Блок SM ST4C реализует модель синхронно-машинной ST4C статической системы возбуждения в соответствии с IEEE 421.5-2016 [1].
Используйте этот блок для моделирования управления и регулирования напряжения поля синхронной машины.
Можно переключаться между непрерывной и дискретной реализациями блока с помощью параметра Sample time (-1 для унаследованного). Чтобы настроить интегратор на непрерывное время, установите для свойства Sample time (-1 для унаследованного) значение 0. Чтобы настроить интегратор на дискретное время, установите для свойства Sample time (-1 для унаследованного) положительное, ненулевое значение или значение -1 для наследования времени выборки из восходящего блока.
Блок ST4C ПЛ состоит из четырех основных компонентов:
Компенсатор тока изменяет измеренное напряжение на клемме в зависимости от тока клеммы.
Измерительный преобразователь напряжения моделирует динамику контактного преобразователя напряжения с помощью фильтра нижних частот.
Компонент «Элементы управления возбуждением» сравнивает выходной сигнал преобразователя напряжения с опорным напряжением клеммы для получения ошибки напряжения. Эта ошибка напряжения затем проходит через регулятор напряжения для получения напряжения поля.
Компонент источника питания моделирует источник питания для управляемого выпрямителя, когда он не зависит от напряжения на клемме.
На этой диаграмме показана общая структура модели системы возбуждения ST4C:
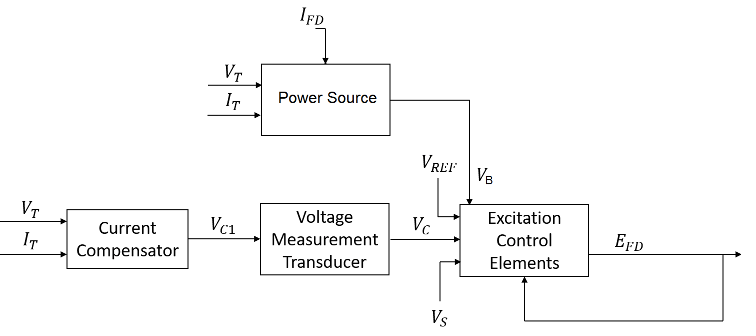
На схеме:
VT и IT - измеренное напряжение на клеммах и ток синхронной машины.
VC1 - напряжение на клемме с компенсацией тока.
VC - отфильтрованное напряжение на клемме с компенсацией тока.
VREF - опорное напряжение на клемме.
VS - напряжение стабилизатора системы питания.
VB - напряжение возбуждения возбудителя.
EFD и IFD - напряжение поля и ток соответственно.
В следующих разделах подробно описывается каждая из основных частей блока.
Компенсатор тока моделируется как:
+ XC2,
где:
RC - сопротивление компенсации нагрузки.
XC - реактивное сопротивление компенсации нагрузки.
Измерительный преобразователь напряжения выполнен в виде блока фильтра нижних частот с постоянной времени TR. Точные дискретные и непрерывные реализации см. в документации по блоку фильтра нижних частот.
Эта диаграмма иллюстрирует общую структуру элементов управления возбуждением:
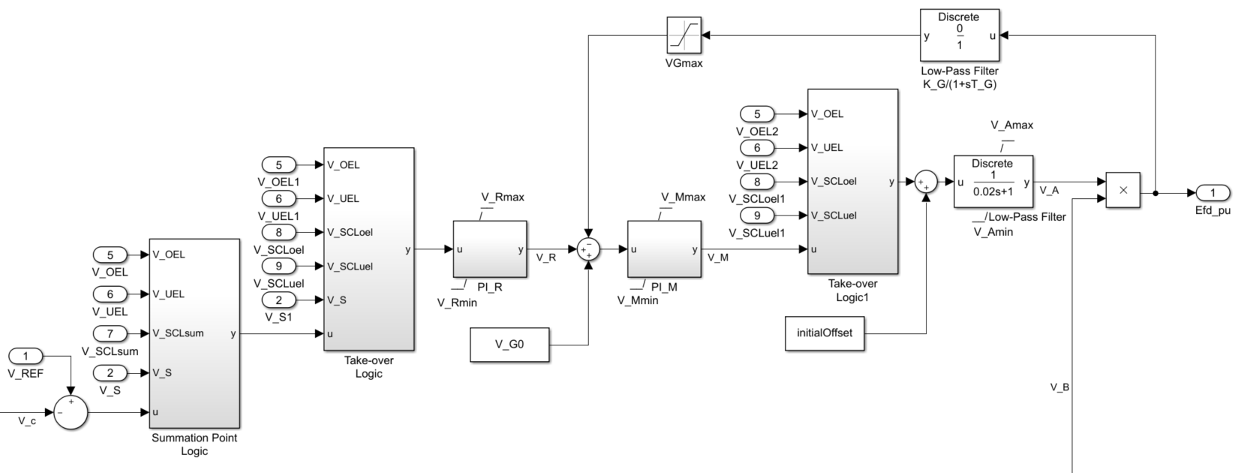
На схеме:
Подсистема логики точки суммирования моделирует входное местоположение точки суммирования для ограничителя чрезмерного возбуждения (OEL), ограничителя недостаточного возбуждения (UEL), ограничителя тока статора (SCL) и напряжения переключателя питания (V_S). Дополнительные сведения об использовании ограничителей с этим блоком см. в разделе Ограничения тока поля.
Существует две подсистемы приемной логики. Подсистемы моделируют расположение входного сигнала точки приема для напряжений OEL, UEL, SCL и PSS. Дополнительные сведения об использовании ограничителей с этим блоком см. в разделе Ограничения тока поля.
Подсистема PI_R моделирует PI-контроллер, который функционирует как управляющая структура для автоматического регулятора напряжения и позволяет представить оборудование, модернизированное с современным цифровым контроллером. Минимальными и максимальными пределами насыщения защиты от навивки для блока являются VPImin и VPImax соответственно.
Подсистема PI_M моделирует PI-контроллер и заменяет блок Lead-Lag в SM ST3C. Минимальными и максимальными пределами насыщения защиты от ветвей для блока являются VMmin и VMmax соответственно.
Внутренний контур управления напряжением поля используется для линеаризации характеристики управления возбудителем и состоит из коэффициентов усиления KM и KG и постоянных времени TM и TG. Минимальными и максимальными предельными значениями насыщения фильтра нижних частот являются VAmin и VAmax соответственно.
Для изменения выходного сигнала регулятора напряжения в небезопасных рабочих условиях можно использовать различные ограничители тока поля:
Для предотвращения перегрева обмотки поля из-за чрезмерной потребности в токе поля используйте ограничитель перегрузки.
Используйте ограничитель неполучения, чтобы увеличить возбуждение поля, когда оно слишком низкое, что создает риск десинхронизации.
Используйте ограничитель тока статора для предотвращения перегрева обмоток статора из-за избыточного тока.
Присоедините выход любого из этих ограничителей в одной из следующих точек:
Точка суммирования в составе контура обратной связи автоматического регулятора напряжения (АВР)
Точка захвата для переопределения обычного поведения AVR
При использовании ограничителя тока статора в точке суммирования используйте одиночный вход VSCLsum. При использовании ограничителя тока статора в точке захвата используйте как вход сверхвыпуска, VSCLoel, так и вход недозволения, VSCLuel.
Можно использовать другое представление источника питания для управляемого выпрямителя, выбрав соответствующую опцию в параметре селектора источника питания. Источник питания для управляемого выпрямителя может быть либо получен из напряжения на клемме (Position A: power source derived from generator terminal voltage) или он может быть независимым от напряжения на клемме (Position B: power source independent of generator terminal conditions).
На этой диаграмме показана модель источника питания возбудителя, использующего фазорную комбинацию напряжения клеммы, VT и тока клеммы, IT:

[1] Рекомендуемая практика IEEE для моделей систем возбуждения для исследований устойчивости энергосистемы. IEEE Std 421.5-2016. Piscataway, NJ: IEEE-SA, 2016.
