Четырехфазная или пятифазная машина с переключаемым сопротивлением (SRM)
Simscape/Электрические/Электромеханические/Нежелательные и шаговые
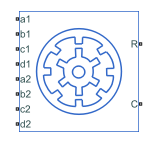
Блок многофазной машины с переключаемым сопротивлением представляет четырех- или пятифазную машину с переключаемым сопротивлением (SRM).
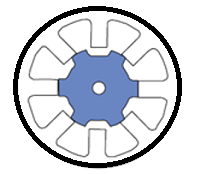
На схеме показана конструкция двигателя для четырехфазной машины.
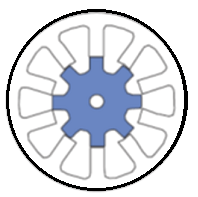
На схеме показана конструкция двигателя для пятифазной машины.
Угол хода ротора для многофазной машины составляет
2.dNsNr
где:
startst - угол стока.
Ns - количество фаз.
Nr - число полюсов ротора.
Способность производства крутящего момента β одного полюса ротора равна
2.dNr.
Математическая модель для машины с переключаемым сопротивлением (SRM) является в высшей степени нелинейной из-за влияния магнитного насыщения на кривую связи потока с углом λ (λ ph). Уравнение фазового напряжения для SRM
startph) dt
где:
vph - напряжение на фазу.
Rs - сопротивление статора на фазу.
iph - ток на фазу.
λ ph - связь потока на фазу.
δph - угол на фазу.
Переписывание уравнения фазового напряжения в терминах частных производных дает это уравнение:
Переходная индуктивность определяется как
∂iph,
или более просто как
Обратная электродвижущая сила определяется как
Подстановка этих терминов в переписанное уравнение напряжения дает это уравнение напряжения:
дифдт + Eph.
Применение формулы ко-энергии к уравнениям для крутящего момента,
∂θr,
и энергии,
) диф.
дает интегральное уравнение, которое определяет мгновенный крутящий момент на фазу, то есть
∂θphdiph.
Интегрирование по фазам дает это уравнение, которое определяет общий мгновенный крутящий момент как
).
Уравнение движения:
− Bmλ
где:
J - инерция ротора.
λ - механическая скорость вращения.
T - крутящий момент ротора. Для блока машины с переключаемым сопротивлением крутящий момент течет от корпуса машины (консервационный порт C блока) к ротору машины (консервационный порт R блока).
TL - момент нагрузки.
J - инерция ротора.
Bm - демпфирование ротора.
Для моделирования высокой точности и разработки управления используйте эмпирические данные и расчет конечных элементов для определения кривой связи потока в терминах тока и угла, то есть
).
При моделировании с низкой точностью можно также аппроксимировать кривую с помощью аналитических методов. Одна из таких методик [2] использует эту экспоненциальную функцию:
iphf (startph)),
где:
λ sat - связь насыщенного потока.
f (startr) получают расширением Фурье.
Для расширения Фурье используйте первые два чётных члена этого уравнения:
Nrstartph)
где a > b,
Lmax2λ sat,
и
Lmin2λ sat.
Нулевой угол ротора соответствует полюсу ротора, который полностью выровнен с α - фазным, то есть пиковым потоком.
Параметры «Переменные» используются для задания приоритетов и начальных целевых значений для переменных блока перед моделированием. Дополнительные сведения см. в разделе Установка приоритета и начальной цели для переменных блока.
[1] Болдея, И. и С. А. Насар. Электроприводы. 2-я редакция Нью-Йорк: CRC Press, 2005.
[2] Илии Спонг, М., Р. Марино, С. Пересада и Д. Тейлор. «Управление линеаризацией обратной связи двигателей с переключаемым сопротивлением». Транзакции IEEE при автоматическом управлении. Том 32, номер 5, 1987, стр. 371-379.



