Синхронная катапультированная машина с синусоидальным распределением потока
Simscape/Электрические/Электромеханические/Нежелательные и шаговые
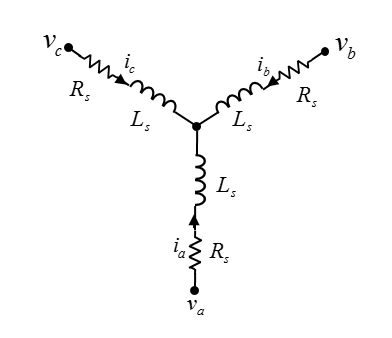
Блок машины синхронного сопротивления представляет машину синхронного сопротивления (SynRM) с синусоидальным распределением потока. На рисунке показана эквивалентная электрическая цепь для обмоток статора.
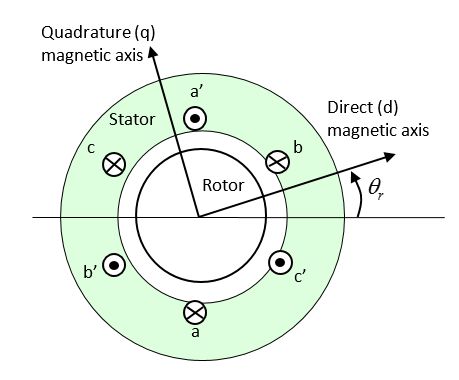
На схеме показана конструкция двигателя с одной полюсной парой на роторе. Для показанного условного обозначения осей, когда механический угол λ r ротора равен нулю, потоки α - фазы и постоянного магнита выравниваются. Блок поддерживает определение второй оси ротора, для которой механический угол ротора определяется как угол между α - фазной магнитной осью и q-осью ротора.
Суммарное напряжение на обмотках статора составляет
d
где:
va, vb и vc - индивидуальные фазные напряжения на обмотках статора.
Rs - эквивалентное сопротивление каждой обмотки статора.
ia, ib и ic - токи, протекающие в обмотках статора.
в качестве магнитных потоков, связывающих каждую обмотку статора.
Постоянный магнит, обмотка возбуждения и три обмотки статора вносят вклад в поток, который связывает каждую обмотку. Общий поток определяется как
iaibic]
где:
Laa, Lbb и Lcc являются самоиндукциями обмоток статора.
Lab, Lac, Lba, Lbc, Lca и Lcb являются взаимными индуктивами обмоток статора.
смещение ротора
2starte),
2δ/3)),
(
(
(
и
(
где:
startr - механический угол ротора.
starte - электрический угол ротора.
смещение ротора - 0 если вы определяете электрический угол ротора относительно оси d, или -pi/2 при определении электрического угла ротора относительно оси q.
Ls - самоиндуктивность статора на фазу. Это значение представляет собой среднюю самоиндуктивность каждой из обмоток статора.
Lm - флуктуация индуктивности статора. Это значение является амплитудой флуктуации собственной индуктивности и взаимной индуктивности с изменением угла ротора.
Ms - взаимная индуктивность статора. Это значение представляет собой среднюю взаимную индуктивность между обмотками статора.
Применение преобразования Park к уравнениям электрического определения блока создает выражение для крутящего момента, которое не зависит от угла ротора.
Преобразование Park, P, определяется как
sin (starte + 2ā3) 121212],
где starte - электрический угол. Электрический угол зависит от механического угла ротора и количества пар полюсов, так что
смещение ротора
где:
N - число пар полюсов.
startr - механический угол ротора.
При применении преобразования парка к первым двум электрическим определяющим уравнениям формируются уравнения, определяющие поведение блока:
NstartiqLq,
NstartidLd,
idiqLq)
− Bmλ,
где:
id, iq и i0 - токи d-оси, q-оси и нулевой последовательности, определяемые
iaibic],
где ia, ib и ic - токи статора.
vd, vq и v0 - токи d-оси, q-оси и нулевой последовательности, определяемые
vavbvc],
где va, vb и vc - токи статора.
Индуктивности dq0 определяются соответственно как
+ 32Lm
− 32Lm
2Ms.
Rs - сопротивление статора на фазу.
N - число пар полюсов ротора.
T - крутящий момент ротора. Для блока синхронной машины с нежелательным сопротивлением крутящий момент течет от корпуса машины (порт C сохранения блоков) к ротору машины (порт R сохранения блоков).
TL - момент нагрузки.
Bm - демпфирование ротора.
λ - механическая частота вращения ротора.
J - инерция ротора.
Блок имеет четыре дополнительных тепловых порта, по одному для каждой из трех обмоток статора и по одному для ротора. По умолчанию эти порты скрыты. Чтобы открыть тепловые порты, щелкните правой кнопкой мыши блок в модели, выберите Simscape > Block choices, а затем выберите требуемый вариант блока с тепловыми портами: Composite theral-phase ports | Show thermal port или Expanded threase-phase ports | Show thermal port. Это действие отображает тепловые порты на значке блока и отображает тепловые параметры. Эти параметры описаны далее на этой справочной странице.
Используйте тепловые порты для моделирования влияния сопротивления меди и потерь железа, которые преобразуют электроэнергию в тепло. Дополнительные сведения об использовании тепловых портов в блоках привода см. в разделе Моделирование тепловых эффектов во вращательных и поступательных приводах.
Параметры «Переменные» используются для задания приоритетов и начальных целевых значений для переменных блока перед моделированием. Дополнительные сведения см. в разделе Установка приоритета и начальной цели для переменных блока.
Распределение потока является синусоидальным.
[1] Kundur, P. Стабильность и управление энергосистемой. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Андерсон, П. М. Анализ неисправных энергосистем. Хобокен, Нью-Джерси: Wiley-IEEE Press, 1995.
[3] Могаддам, Р. Машина синхронного нежелания (SynRM) в приложениях приводов с переменной скоростью (VSD) - теоретическая и экспериментальная переоценка. KTH Школа электротехники, Стокгольм, Швеция, 2011.


