Геометрический якобиан для конфигурации робота
jacobian = geometricJacobian(robot,configuration,endeffectorname)
jacobian - Геометрический якобианГеометрический якобиан концевого эффектора с указанным configuration, возвращается в виде матрицы 6 на n, где n - число степеней свободы для конечного эффектора. Якобиан отображает скорость суставного пространства в конечную скорость эффектора относительно базовой рамки координат. Скорость конечного эффектора равна:
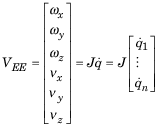
λ - это угловая скорость, start- линейная скорость и![]() скорость соединения между пространством.
скорость соединения между пространством.
getTransform | homeConfiguration | randomConfiguration | rigidBody | rigidBodyJoint
