Можно использовать PID-тюнер для интерактивной настройки усиления PID в модели Simulink ®, содержащей блок PID-контроллера, дискретного PID-контроллера, PID-контроллера (2DOF) или дискретного PID-контроллера (2DOF). Дополнительные сведения см. в разделе Введение в настройку PID на основе модели в Simulink.
Перед использованием PID-тюнера необходимо выполнить следующие действия:
Создание модели Simulink, содержащей блок PID-контроллера, дискретного PID-контроллера, PID-контроллера (2DOF) или дискретного PID-контроллера (2DOF). Модель может иметь один или несколько блоков PID, но одновременно можно настроить только один блок PID.
При настройке многолучевой системы управления с подключением между контурами рекомендуется использовать другие инструменты Simulink Control Design™ вместо PID-тюнера. Дополнительные сведения см. в разделе Выбор подхода к проектированию элементов управления.
Контроллер PID блокирует сигналы вектора поддержки. Однако использование PID-тюнера требует скалярных сигналов на входах блоков. То есть блок PID должен представлять один контроллер PID.
Установка (все блоки в контуре управления, кроме контроллера) может быть линейной или нелинейной. Завод также может быть любого порядка и иметь любые временные задержки.
Настройте параметры блока PID, такие как тип контроллера, форма контроллера, временная область, время выборки. Дополнительные сведения об этих настройках блоков см. на страницах отдельных ссылок на блоки:
Чтобы открыть PID-тюнер и просмотреть начальную конструкцию компенсатора:
Откройте модель Simulink, введя имя модели в командной строке MATLAB ®.
Для открытия диалогового окна блока дважды щелкните на блоке контроллера PID.
В диалоговом окне блока в раскрывающемся списке «Выбор метода настройки» выберите Transfer Function Based (PID Tuner App). Чтобы открыть PID-тюнер, нажмите кнопку «Настройка».
При открытии PID-тюнера выполняются следующие действия:
PID Tuner автоматически линеаризует установку в рабочей точке, заданной исходными условиями модели, как описано в разделе Что из себя представляет PID Tuner?. Если вы хотите разработать контроллер для другой рабочей точки, см. раздел Настройка в другой рабочей точке.
Примечание
Если модель установки в цикле PID линеаризуется до нуля, PID-тюнер предоставляет диалоговое окно «Получение модели установки». Это диалоговое окно позволяет получить новую модель завода одним из следующих способов:
Линеаризация в другой рабочей точке (см. Настройка в другой рабочей точке).
Импорт объекта модели LTI, представляющего завод. Например, можно импортировать данные частотной характеристики (frd модель), полученную путем оценки частотного отклика. Дополнительные сведения см. в разделе Проектирование PID-контроллера с использованием расчетной частотной характеристики.
Определение линейной модели установки на основе смоделированных или измеренных данных ответа (требуется программное обеспечение Toolbox™ идентификации системы). PID Tuner использует системную идентификацию для оценки линейной модели установки из отклика предприятия во временной области на примененные входные данные. Пример см. в разделе Интерактивная оценка завода на основе измеренных или смоделированных данных ответа.
В качестве альтернативы можно выйти из PID-тюнера и использовать PID-тюнер на основе частотного отклика, который выполняет моделирование для возмущения установки и оценки частотных откликов на частотах вблизи полосы пропускания управления. См. раздел Настройка на основе частотного отклика.
PID Tuner вычисляет начальную конструкцию компенсатора для линеаризованной модели установки, используя алгоритм, описанный в PID Tuning Algorithm.
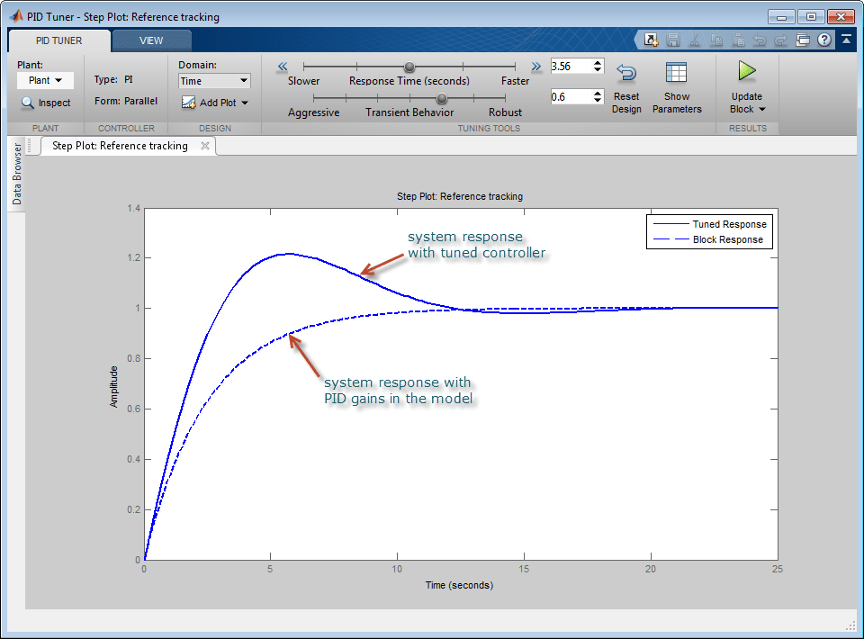
PID Tuner отображает отклик контрольного отслеживания шага с замкнутым контуром для начальной конструкции компенсатора. Для сравнения, дисплей также включает в себя отклик по замкнутому контуру для коэффициентов усиления, заданных в блоке контроллера PID, если этот замкнутый контур стабилен, как показано на следующем рисунке.
Совет
После открытия тюнера можно закрыть диалоговое окно блока контроллера.
