Настройка PID-контроллеров
MATLAB Toolstrip: на вкладке Приложения в разделе Проектирование и анализ системы управления щелкните значок приложения.
командная строка MATLAB: Enter pidTuner.
Модель Simulink: в диалоговом окне «PID Controller» или «PID Controller (2DOF) block» нажмите кнопку «Tune».
Plant - Текущий заводImport | ...В меню Plant отображается имя текущего завода, используемого PID Tuner для проектирования контроллера.
Измените текущее производство с помощью следующих опций меню:
Список моделей LTI, представленных в браузере данных тюнера PID.
Import - импорт новой модели LTI из рабочей области MATLAB.
Re-Linearize Closed Loop - Линеаризация растения в другое время снимка. См. раздел Настройка в другой операционной точке (Simulink Control Design). Эта опция доступна только при настройке блока контроллера PID или контроллера PID (2DOF) в модели Simulink.
Identify New Plant - Использование идентификации системы для получения установки на основе измеренных или смоделированных данных ответа системы (требуется программное обеспечение System Identification Toolbox). См.:
Интерактивная оценка параметров установки по ответным данным при настройке PID-контроллера для модели LTI.
Интерактивная оценка установки на основе измеренных или смоделированных данных ответа (Simulink Control Design) при настройке блока контроллера PID в модели Simulink.
При настройке PID-контроллера для установки, представленной моделью LTI, по умолчанию используется следующая установка:
Plant = 1, если вы открыли PID-тюнер на вкладке «Приложения» в MATLAB Toolstrip, или если вы использовали pidTuner без входного аргумента.
Завод, указанный в качестве входного аргумента для pidTuner.
При настройке блока PID Controller или PID Controller (2DOF) в модели Simulink установка по умолчанию линеаризуется в рабочей точке, заданной начальными условиями модели. Смотрите раздел Какое растение видит тюнер PID? (Проект управления Simulink)
Type - Тип контроллера'PI' | 'PIDF' | 'PID2' | ...Тип контроллера определяет, какие термины присутствуют в контроллере PID. Например, PI-контроллер имеет пропорциональный и интегральный член. Контроллер PDF имеет пропорциональный член и отфильтрованный член производной.
При настройке контроллера для установки, представленной моделью LTI, используйте меню Тип (Type) для указания типа контроллера. При изменении типа контроллера PID-тюнер автоматически проектирует новый контроллер. Доступные типы диспетчера включают диспетчеров PID с 2 финансовыми департаментами для большей гибкости в компромиссе между отклонением волнения и справочным отслеживанием. Дополнительные сведения о доступных типах контроллеров см. в разделе Типы контроллеров PID для настройки.
При настройке блока контроллера PID или контроллера PID (2DOF) в модели Simulink в поле Тип отображается тип контроллера, указанный в диалоговом окне блока.
Form - Форма контроллера'Parallel' | 'Standard'В этом поле отображается форма контроллера.
При настройке контроллера для завода, представленного моделью LTI, используйте меню Форма (Form), чтобы указать форму контроллера. Сведения о параллельных и стандартных формах см. в разделе pid и pidstd справочные страницы.
При настройке блока контроллера PID или контроллера PID (2DOF) в модели Simulink в поле Форма отображается форма контроллера, указанная в диалоговом окне блока.
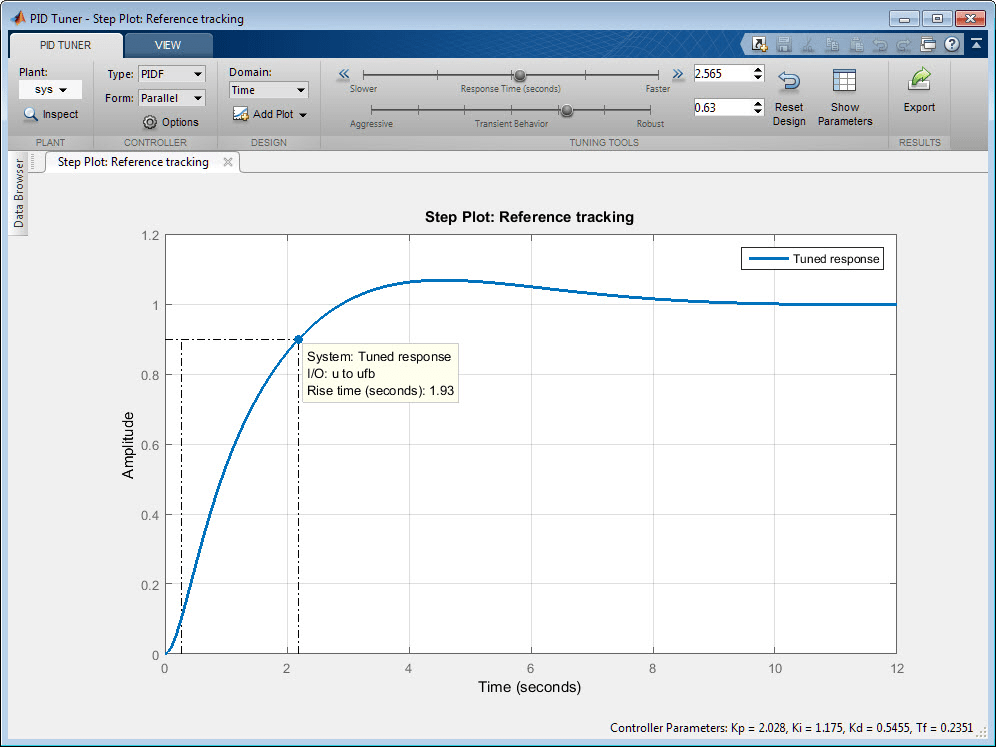
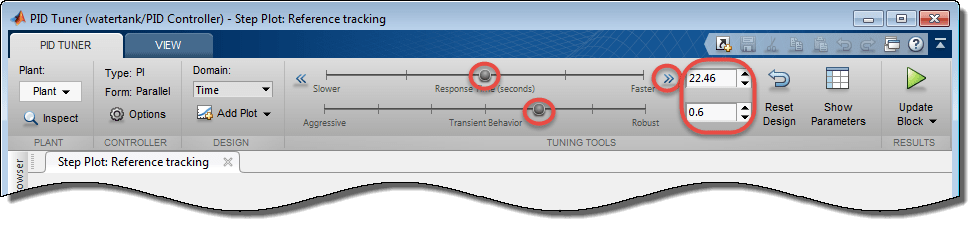
Domain - Домен для указания целевых показателей производительности'Time' | 'Frequency'Меню Domain позволяет переключать домен, в котором PID-тюнер отображает целевые параметры производительности.
Time - ползунки устанавливают время отклика и переходное поведение.
Frequency - ползунки задают полосу пропускания и запас по фазе.
Для уточнения конструкции контроллера необходимо настроить целевые параметры производительности с помощью ползунков или соответствующих числовых значений.
Дополнительные сведения см. в разделе:
Уточнение конструкции (настройка контроллера для модели LTI)
Уточнение конструкции (Simulink Control Design) (настройка PID-контроллера или блока PID-контроллера (2DOF) в модели Simulink)
Add Plot - Создание графиков анализаReference Tracking | Input Disturbance Rejection | Controller Effort | ...Создание графиков анализа временной и частотной областей для анализа производительности PID-контроллера. Подробную информацию о доступных графиках ответов см. в разделе:
Анализ проекта в тюнере PID (настройка контроллера для модели LTI)
Анализ проекта в PID-тюнере (Simulink Control Design) (настройка PID-контроллера или блока PID-контроллера (2DOF) в модели Simulink)
Для настройки PID в командной строке используйте pidtune. pidtune команда может проектировать контроллер для нескольких установок одновременно.
Для получения информации о интерактивной настройке PID в интерактивном редакторе см. задачу Настройка контроллера PID в интерактивном редакторе. Эта задача позволяет в интерактивном режиме проектировать контроллер PID и автоматически генерировать код MATLAB для сценария в реальном времени.
