Обеспечение пассивности частотно-взвешенной передаточной функции при настройке в тюнере системы управления.
Взвешенная пассивность Цель обеспечивает пассивность H (s) = WL (s) T (s) WR (s), где T (s) - передаточная функция от указанных входов к выходам. WL (s) и WR (s) являются весами частот, используемыми для выделения конкретных полос частот. Система пассивна, если все ее траектории ввода-вывода (u (t), y (t)) удовлетворяют:
dt > 0,
для всех T > 0. Цель взвешенной пассивности создает ограничение, которое обеспечивает:
) Ty (t) dt,
для траекторий взвешенной передаточной функции H (s), для всех T > 0. Для обеспечения выполнения общего условия пассивности установите минимальный индекс пассивности на входе ( Чтобы обеспечить превышение пассивности на входах или выходах взвешенной передаточной функции, установите (или) в положительное значение. Чтобы допустить дефицит пассивности, установите (или) в отрицательное значение. ПосмотритеgetPassiveIndex для получения дополнительной информации об этих индексах.
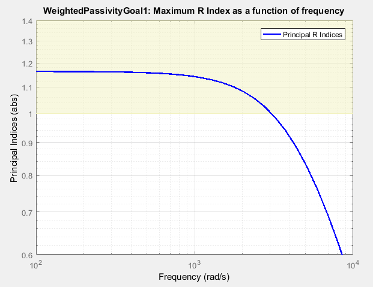
В тюнере системы управления затененная область на графике представляет область в частотной области, в которой цель настройки не достигнута. На графике показано значение индекса, описанного в разделе Алгоритмы.
На вкладке «Настройка» окна «Настройка системы управления» выберите «Новая цель» > «Взвешенная цель пассивности».
При настройке систем управления в командной строке используйте TuningGoal.WeightedPassivity для указания цели ответа на шаг.
Этот раздел диалогового окна используется для задания входов и выходов передаточной функции, ограничиваемой целью настройки. Также укажите любые расположения, в которых следует открывать контуры для оценки цели настройки.
Указать входные сигналы
Выберите одно или несколько расположений сигналов в модели в качестве входных данных функции передачи, которую ограничивает цель настройки. Чтобы ограничить отклик SISO, выберите однозначный входной сигнал. Например, чтобы ограничить выигрыш от расположения с именем 'u' в расположение с именем 'y', нажмите![]() Добавить сигнал в список и выберите
Добавить сигнал в список и выберите 'u'. Чтобы ограничить пассивность MIMO-ответа, выберите несколько сигналов или сигнал с векторными значениями.
Указать выходные сигналы
Выберите одно или несколько расположений сигналов в модели в качестве выходных данных передаточной функции, которую ограничивает цель настройки. Чтобы ограничить отклик SISO, выберите выходной сигнал с одним значением. Например, чтобы ограничить выигрыш от расположения с именем 'u' в расположение с именем 'y', нажмите![]() Добавить сигнал в список и выберите
Добавить сигнал в список и выберите 'y'. Чтобы ограничить пассивность MIMO-ответа, выберите несколько сигналов или сигнал с векторными значениями.
Вычислить коэффициент усиления при разомкнутых следующих контурах
Выберите одно или несколько расположений сигналов в модели, в которых следует открыть цикл обратной связи для оценки этой цели настройки. Цель настройки оценивается по конфигурации с разомкнутым контуром, созданной путем открытия контуров обратной связи в определенных местоположениях. Например, чтобы оценить цель настройки с помощью проема в месте с именем 'x', нажмите![]() Добавить сигнал в список и выберите
Добавить сигнал в список и выберите 'x'.
Совет
Чтобы выделить любой выбранный сигнал в модели Simulink ®, щелкните значок![]() . Чтобы удалить сигнал из списка ввода или вывода, щелкните значок.
. Чтобы удалить сигнал из списка ввода или вывода, щелкните значок. ![]() После выбора нескольких сигналов их можно переупорядочить с помощью
После выбора нескольких сигналов их можно переупорядочить с помощью![]() и.
и. ![]() Дополнительные сведения о том, как указать расположение сигнала для цели настройки, см. в разделе Указание целей для интерактивной настройки.
Дополнительные сведения о том, как указать расположение сигнала для цели настройки, см. в разделе Указание целей для интерактивной настройки.
Используйте текстовые поля Левый вес WL и Правый вес WR, чтобы указать функции взвешивания частоты для цели настройки. H (s) = WL (s) T (s) WR (s), где T (s) - передаточная функция от указанных входов к выходам.
WL обеспечивает взвешивание для выходных каналов H (s), а WR обеспечивает взвешивание для входных каналов. Можно задать скалярные веса или частотно-зависимое взвешивание. Чтобы задать частотно-зависимое взвешивание, используйте числовую модель LTI, величина которой представляет требуемую весовую функцию. Например, введитеtf(1,[1 0.01]) для задания большого веса при низких частотах, который падает выше 0,01 рад/с.
Если цель настройки ограничивает передаточную функцию MIMO, скалярные или весовые функции SISO автоматически расширяются до любого входного или выходного измерения. Можно задать различные веса для каждого канала, задав матрицы или функции взвешивания MIMO. Размеры H (s) должны быть соизмеримы с размерами WL и WR. Например, если ограниченная передаточная функция имеет два входа, можно указатьdiag([1 10]) как WR.
При настройке за дискретное время можно указать функции взвешивания как модели дискретного времени с тем же временем выборки, что и при настройке. Если функции взвешивания задаются в непрерывном режиме, программа настройки дискретизирует их. Определение весовых функций в дискретное время дает больший контроль над весовыми функциями вблизи частоты Найквиста.
Этот раздел диалогового окна используется для определения дополнительных характеристик цели ответа на шаг.
Минимальный индекс пассивности на входе
Введите в текстовое поле целевое значение, равное,. Чтобы провести в жизнь избыток пассивности в указанных исходных данных, установите ν> 0. Чтобы допустить дефицит пассивности, установите (< 0). По умолчанию цель пассивности проводит в жизнь ν = 0, пассивный в исходных данных без необходимого избытка пассивности.
Минимальный индекс пассивности на выходе
Введите в текстовое поле целевое значение, равное Чтобы обеспечить избыточную пассивность на указанных выходах, установите (set > 0). Чтобы избежать недостатка пассивности, установите (< 0). По умолчанию, цель пассивности принудительно приводит в действие start= 0, пассивный на выходах без требуемого превышения пассивности.
Обеспечение цели в частотном диапазоне
Ограничьте применение цели настройки определенной полосой частот. Укажите полосу частот как вектор строки формы [min,max], выраженное в единицах частоты модели. Например, чтобы создать цель настройки, применяемую только в диапазоне от 1 до 100 рад/с, введите [1,100]. По умолчанию цель настройки применяется на всех частотах для непрерывного времени и до частоты Найквиста для дискретного времени.
Применить цель к
Эта опция используется при настройке сразу нескольких моделей, например массива моделей, полученных линеаризацией модели Simulink в различных рабочих точках или значениями параметров блока. По умолчанию активные цели настройки применяются для всех моделей. Чтобы применить требование настройки для подмножества моделей в массиве, выберите Только модели (Only Models). Затем введите индексы массива моделей, для которых применяется цель. Например, предположим, что необходимо применить цель настройки ко второй, третьей и четвертой моделям в массиве модели. Для ограничения применения требования введите 2:4 в текстовом поле «Только модели».
Дополнительные сведения о настройке для нескольких моделей см. в разделе Подходы к надежной настройке (инструментарий надежного управления).
При настройке системы управления программа преобразует каждую цель настройки в нормализованное скалярное значение f (x). Здесь x - вектор свободных (настраиваемых) параметров в системе управления. Затем программа корректирует значения параметров для минимизации f (x) или для приведения f (x) ниже 1, если цель настройки является жестким ограничением.
Для цели взвешенной пассивности для функции T (s, x) передачи с замкнутым контуром от указанных входов к указанным выходам и взвешенной функции H (s, x) передачи = WL (s) T (s, x) WR (s), f (x) задается как:
= 106.
R - относительный индекс сектора (см. getSectorIndex) [H (s, x); I], для сектора, представленного :
где start- минимальный индекс пассивности на выходе, а start- минимальный индекс пассивности на входе, указанный в диалоговом окне. Rmax зафиксирован на уровне 106, включен во избежание числовых ошибок для очень больших R.
Эта цель настройки накладывает неявное ограничение минимальной фазы на взвешенную передаточную функцию H + I. Нули передачи H + I являются стабилизированной динамикой для этой цели настройки. Опции Минимальная скорость затухания (Minimum decay rate) и Максимальная собственная настройка частоты (Maximum natural frequency) управляют нижней и верхней границами этой неявно ограниченной динамики. Если оптимизация не соответствует границам по умолчанию или если границы по умолчанию противоречат другим требованиям, на вкладке Настройка (Tuning) воспользуйтесь опциями настройки для изменения значений по умолчанию.
