Перед конфигурированием модели выполните процедуру в разделе Настройка EtherCAT-сети с помощью TwinCAT 3.
Настройка модели slrt_ex_ethercat_beckhoff_aio для выполнения с использованием целевого компьютера в качестве главного узла выполните процедуру в разделе Configure EtherCAT Init Block.
Перед использованием блока EtherCAT Init настройте сеть EtherCAT ® с помощью TwinCAT ® 3.
Перед началом этой процедуры ознакомьтесь с TwinCAT 3 и его документацией.
В процессе конфигурирования создайте и сохраните файл сетевой информации EtherCAT (ENI). См. раздел Настройка EtherCAT-сети с использованием TwinCAT 3.
Для включения распределенных синхросигналов EtherCAT при включении PTP для модели используйте режим сдвига шины EtherCAT.
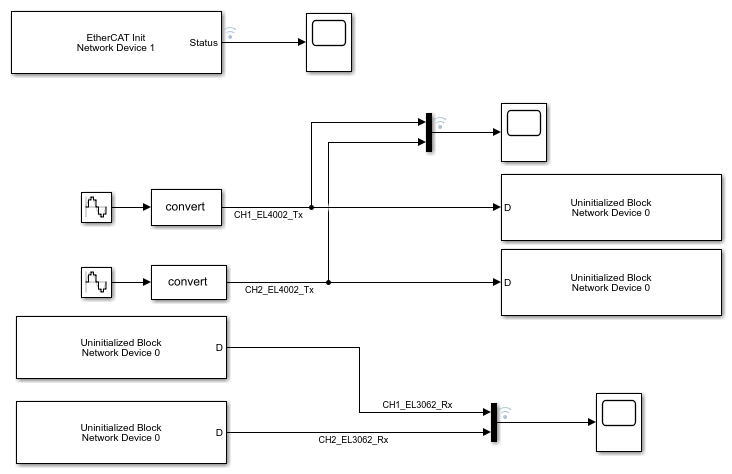
Конфигурирование блока EtherCAT Init модели slrt_ex_ethercat_beckhoff_aio:
Открытая модель slrt_ex_ethercat_beckhoff_aio. В окне команды MATLAB введите:
open_system(fullfile(matlabroot, 'toolbox', 'slrealtime',... 'examples', 'slrt_ex_ethercat_beckhoff_aio'))
Дважды щелкните по блоку EtherCAT Init.
В текстовом поле Config File (ENI) перейдите к файлу сетевой информации EtherCAT (ENI), созданному при настройке сети (здесь 'BeckhoffAIOconfig.xml'). Можно ввести имя файла с одиночными кавычками или без них.
Использовать значение по умолчанию 0 для параметра Device index.
Если модель включает несколько сетей EtherCAT, введите уникальный индекс устройства для каждой сети. Введите одинаковое значение для всех блоков в каждой сети.
Введите номер порта Ethernet для порта EtherCAT, подключенного к сети EtherCAT. См. раздел Установка EtherCAT-сети для выполнения.
Принять значение по умолчанию Large model для настройки параметра DC.
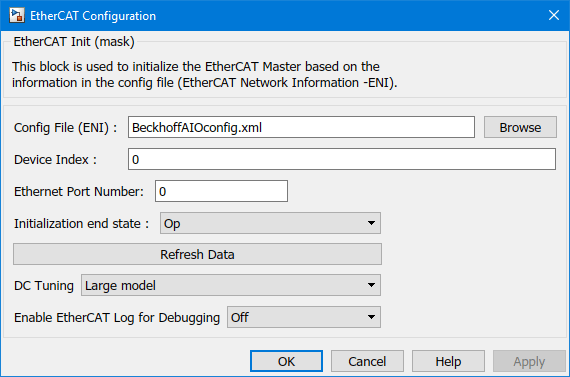
Чтобы обновить данные в блоке EtherCAT Init и распространить их на другие блоки EtherCAT, нажмите кнопку Обновить данные.
Нажмите кнопку ОК.
Перед началом этой процедуры необходимо выбрать допустимый файл ENI в блоке EtherCAT Init.
Перед началом этой процедуры ознакомьтесь с TwinCAT 3 и его документацией.
Конфигурирование блоков приема EtherCAT PDO модели slrt_ex_ethercat_beckhoff_aio:
Дважды щелкните по блоку EtherCAT PDO Receive с меткой EtherCAT PDO Receive.
Установите для параметра Device Index значение, установленное в блоке EtherCAT Init.
В списке Signal Name выберите переменную. Term 2 (EL3062).AI Standard Channel 1.Value.
Проверьте значение параметра Sample Time в секундах.
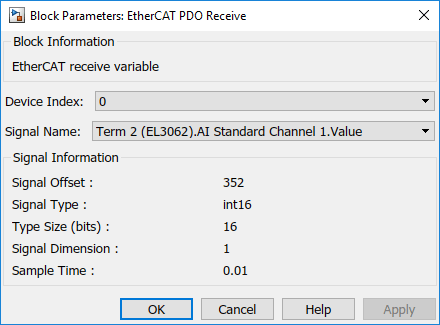
Нажмите кнопку ОК.
Выполните шаги 1-5 для блока приема EtherCAT PDO с меткой EtherCAT PDO Receive 1.
Перед началом этой процедуры необходимо выбрать допустимый файл ENI в блоке EtherCAT Init.
Перед началом этой процедуры ознакомьтесь с TwinCAT 3 и его документацией.
Конфигурирование блоков передачи EtherCAT PDO модели slrt_ex_ethercat_beckhoff_aio:
Открытая модель slrt_ex_ethercat_beckhoff_aio.
Дважды щелкните блок EtherCAT PDO Transmit с меткой EtherCAT PDO Transmit.
Установите для параметра Device Index значение, установленное в блоке EtherCAT Init.
Выберите переменную Signal Name, здесь Term 3 (EL4002).AO Outputs Channel 1.Analog output.
Проверьте значение параметра Sample Time в секундах.
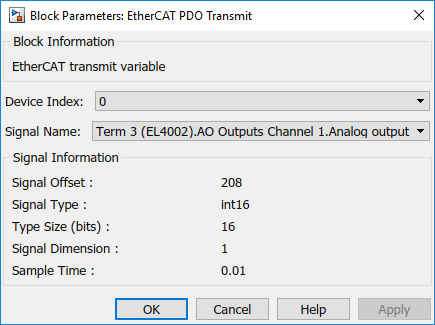
Нажмите кнопку ОК.
Выполните шаги 2-6 для блока передачи EtherCAT PDO с меткой EtherCAT PDO Transmit 1.
Перед началом этой процедуры необходимо выбрать допустимый файл ENI в блоке EtherCAT Init. Дополнительные сведения см. в разделе Деривация фиксированного размера шага.
Конфигурирование параметров конфигурации для модели slrt_ex_ethercat_beckhoff_aio:
Открытая модель slrt_ex_ethercat_beckhoff_aio.
Вычислите наибольший общий делитель (GCD) значений времени выборки для задач EtherCAT и для всех исходных блоков в модели. В этом случае GCD является 0.010.
В редакторе Simulink ® на вкладке «Real-Time» в разделе «Prepare» выберите «Hardware Settings». Выберите Параметры конфигурации > Решатель.
Задайте для параметра Type значение Fixed-step и фиксированный размер шага (основное время выборки) к одному из следующих:
Интегральный делитель значения GCD в секундах.
auto, если все остальные исходные блоки в модели имеют определенное время выборки.
В этом случае задайте для параметра значение 0.010.
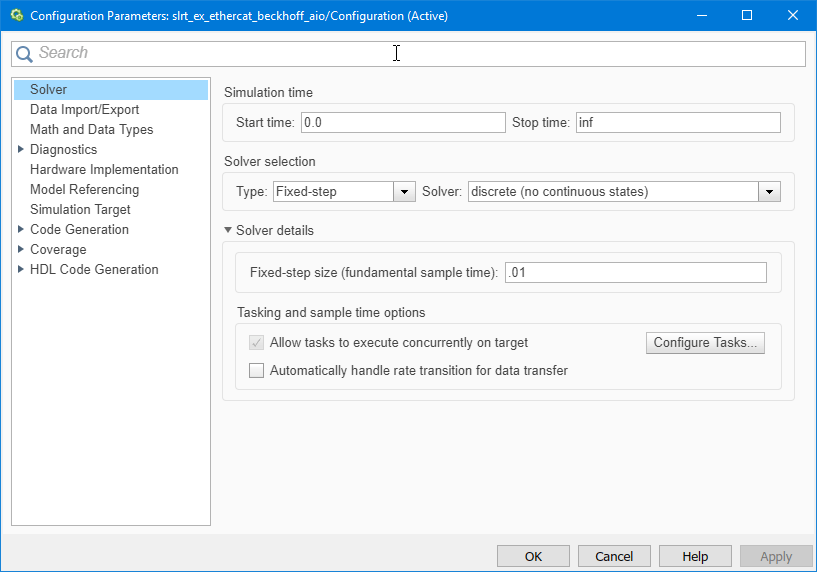
Нажмите кнопку ОК.
Следующие задачи - построение, загрузка и выполнение модели главного узла EtherCAT.
