Применение геометрического преобразования к ограничивающим рамкам
bboxB = bboxwarp( преобразует ограничивающие рамки в bboxA,tform,ref)bboxA в соответствии с геометрическим преобразованием, определенным tform. Ограничивающими прямоугольниками могут быть выровненные по оси прямоугольники, повернутые прямоугольники или кубоиды. Объект пространственной ссылки, refопределяет вид вывода, в который преобразуются поля.
[___] = bboxwarp(___,'OverlapThreshold', дополнительно устанавливает порог перекрытия.threshold)
Прочтите изображение.
I = imread('peppers.png');Определите ограничивающие рамки и метки.
bboxA = [
410 230 100 90
186 78 80 60
]bboxA = 2×4
410 230 100 90
186 78 80 60
labelsA = [
"garlic"
"onion"
];Определите преобразование для горизонтального разворота и перемещения изображения.
tform = affine2d([-1 0 0; 0 1 0; 50 50 1]);
Создание выходного представления для imwarp.
rout = affineOutputView(size(I),tform);
Деформируйте изображение.
J = imwarp(I,tform,'OutputView',rout);Деформируйте коробки.
[bboxB,indices] = bboxwarp(bboxA,tform,rout); labelsB = labelsA(indices);
Просмотрите результаты.
annotatedI = insertObjectAnnotation(I,'Rectangle',bboxA,labelsA); annotatedJ = insertObjectAnnotation(J,'Rectangle',bboxB,labelsB); figure montage({annotatedI, annotatedJ})

bboxA - Ограничивающие рамкиОграничивающие рамки, заданные как M-by-4, M-by-5 или M-by-9 непарабельная числовая матрица M ограничивающих рамок. Каждая строка матрицы M определяет ограничивающую рамку как прямоугольник, выровненный по оси, прямоугольник поворота или кубоид. В таблице ниже описан формат ограничивающих рамок.
| Ограничивающая рамка | Описание |
|---|---|
| Выровненный по оси прямоугольник |
Определяется в координатах пикселей как M-by-4 числовая матрица со строками вида [x y w h] , где :
|
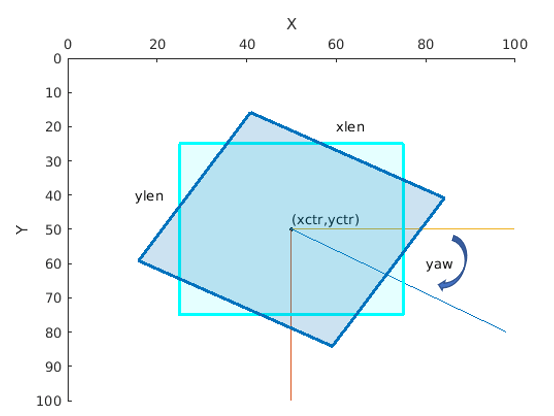
| Повернутый прямоугольник |
Определяется в пространственных координатах как M-by-5 числовая матрица со строками вида [xctr yctr xlen ylen yaw ], где:
|
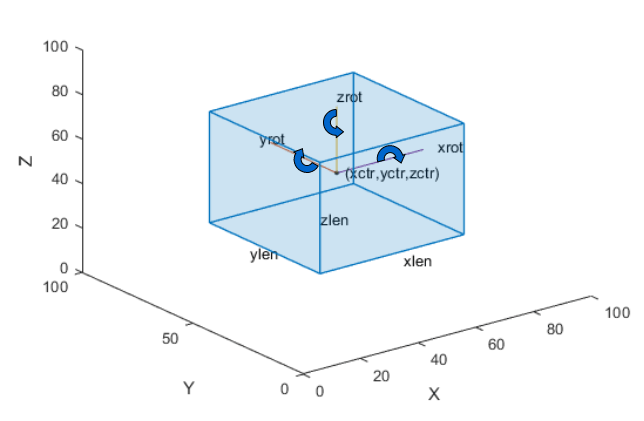
| Cuboid |
Определяется в пространственных координатах как M-by-9 числовая матрица со строками вида [xctr yctr zctr xlen ylen zlen xrot yrot zrot], где :
На рисунке показано, как эти значения определяют положение кубоида.
|
tform - Геометрическое преобразованиеaffine2d объект (по умолчанию)Геометрическое преобразование, указанное в affine2d объект. Функция bboxwarp поддерживает только аффинные преобразования масштаба, поворота и перемещения.
ref - Пространственная привязкаimref2d объектПространственная ссылка, указанная как imref2d объект, возвращенный imwarp или affineOutputView функция. Объект определяет окно вывода для преобразования. Поля, которые полностью преобразованы вне выходного представления, определенного ref отбрасываются.
[J,rout] = imwarp(I,tform); [bboxB,indices] = bboxwarp(bboxA,tform,rout);
rout = affineOutputView(size(I),tform) J = imwarp(I,tform,'OutputView',rout); [bboxB,indices] = bboxwarp(bboxA,tform,rout);
threshold - Порог перекрытия1Порог перекрытия, заданный как положительный скаляр, меньший или равный 1. Величина перекрытия между преобразованными полями и областью, определенной видом вывода, определяется следующим образом:
площадь (bbox пересекает ограничивающий прямоугольник )/площадь (bbox)
Если вычисленное значение перекрытия больше значения threshold затем преобразованные поля обрезаются до границы ограничивающего прямоугольника. В противном случае ящики отбрасываются. Снижение порога может привести к тому, что части объекта будут отброшены.
bboxcrop | bboxerase | bboxresize | imcrop | imwarp