Уточнение позы камеры и 3-D точек
[ возвращает уточненные точки 3-D и позы камеры, которые минимизируют ошибки обратного впрыска. Процедура уточнения является вариантом алгоритма Левенберга - Марквардта. Точки 3-D и позы камеры размещаются в одной и той же глобальной системе опорных координат.xyzRefinedPoints,refinedPoses] = bundleAdjustment(xyzPoints,pointTracks,cameraPoses,intrinsics)
[___, дополнительно возвращает вектор N-элемента, содержащий среднее значение ошибки репроекции для каждой точки мира 3-D, используя аргументы из предыдущего синтаксиса.reprojectionErrors] = bundleAdjustment(___)
[___] = bundleAdjustment(___, использует дополнительные параметры, указанные одним или несколькими Name,Value)Name,Value аргументы пары. Неопределенные свойства имеют значения по умолчанию.
Загрузить данные для инициализации.
data = load('sfmGlobe');Уточните позы и точки камеры.
[xyzRefinedPoints,refinedPoses] = ...
bundleAdjustment(data.xyzPoints,data.pointTracks,data.cameraPoses,data.intrinsics);Отображение улучшенных поз камеры и 3-D точек мира.
pcshow(xyzRefinedPoints,'VerticalAxis','y','VerticalAxisDir',... 'down','MarkerSize',45); hold on plotCamera(refinedPoses,'Size',0.1); hold off grid on

xyzRefinedPoints - 3-D места расположения уточненных мировых точек3-D местоположения уточненных точек мира, возвращаемые в виде матрицы M-by-3 [x, y, z] местоположений.
Типы данных: single | double
refinedPoses - Улучшенные позы камерыРафинированная камера позирует, возвращается в виде таблицы. Таблица содержит три столбца для 'ViewId', 'Orientation', и 'Location'.
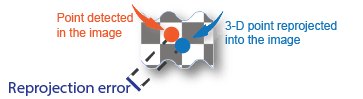
reprojectionErrors - Ошибки повторного впрыскаОшибки повторного впрыска, возвращенные в виде вектора M-by-1. Функция проецирует каждую точку мира обратно в каждую камеру. Затем в каждом изображении функция вычисляет ошибку повторного впрыска как расстояние между обнаруженной и повторно спроецированной точкой. reprojectionErrors вектор содержит среднюю ошибку репроекции для каждой точки мира.
[1] Луракис, М.И.А. и А.А. Аргирос. «Преимущества для малого бизнеса: пакет программного обеспечения для настройки общего разреженного пакета». Транзакции ACM на математическом программном обеспечении. 2009.
[2] Хартли, R. и А. Зиссермен. Геометрия нескольких видов в компьютерном видении. Издательство Кембриджского университета, 2003 год.
[3] Триггеры, B., P. McLauchlan, R. Hartley и A. Fitzgibbon. «Корректировка пучка: современный синтез». Материалы Международного рабочего совещания по алгоритмам видения. Спрингер-Верлаг. 1999, стр. 298-372.
bundleAdjustmentMotion | bundleAdjustmentStructure | cameraMatrix | relativeCameraPose | triangulateMultiview | undistortImage | undistortPoints