Правильное изображение для искажения объектива
[ возвращает изображение, J,newOrigin] = undistortImage(I,cameraParams)J, содержащий входное изображение, I, со снятой дисторсией линзы. Функция также возвращает местоположение [x, y] источника выходного изображения. Местоположение задается в терминах входных внутренних координат, указанных вcameraParams.
[ задает метод интерполяции для функции, используемой на входном изображении.J,newOrigin] = undistortImage(I,cameraParams,interp)
[ указывает один или несколько J,newOrigin] = undistortImage(___,Name,Value)Name,Value пары аргументов, используя любой из предшествующих синтаксисов. Неопределенные свойства имеют значения по умолчанию.
Создайте набор калибровочных изображений.
images = imageDatastore(fullfile(toolboxdir('vision'),'visiondata', ... 'calibration','mono'));
Обнаружение шаблона калибровки.
[imagePoints,boardSize] = detectCheckerboardPoints(images.Files);
Создание мировых координат углов квадратов. Размер квадрата в миллиметрах.
squareSize = 29; worldPoints = generateCheckerboardPoints(boardSize,squareSize);
Откалибруйте камеру.
I = readimage(images,1); imageSize = [size(I,1),size(I,2)]; cameraParams = estimateCameraParameters(imagePoints,worldPoints, ... 'ImageSize',imageSize);
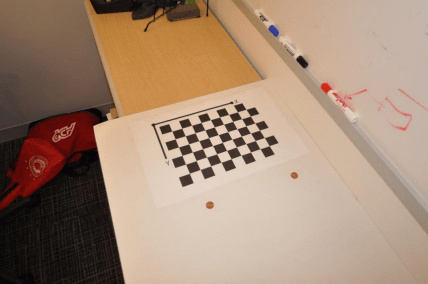
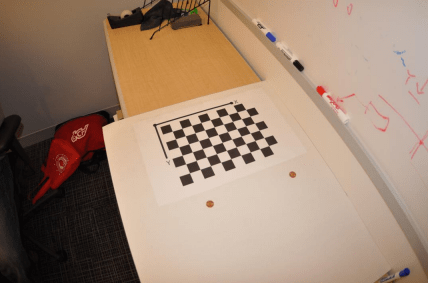
Удаление искажения объектива и отображение результатов.
I = images.readimage(1); J1 = undistortImage(I,cameraParams);
figure; imshowpair(I,J1,'montage'); title('Original Image (left) vs. Corrected Image (right)');

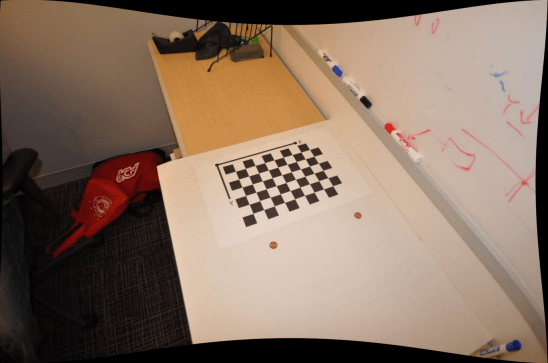
J2 = undistortImage(I,cameraParams,'OutputView','full'); figure; imshow(J2); title('Full Output View');

I - Входное изображениеВходное изображение, определенное или в M N 3 truecolor или в 2-х оттенках серого M на Н. Входное изображение должно быть реальным и непроверенным.
Типы данных: single | double | int16 | uint8 | uint16 | logical
cameraParams - Объект для хранения параметров камерыcameraParameters объект | cameraIntrinsics объектПараметры камеры, указанные как cameraParameters или cameraIntrinsics объект. Вы можете вернуть cameraParameters с использованием estimateCameraParameters функция. cameraParameters объект содержит внутренние, внешние параметры и параметры искажения объектива камеры.
interp - Метод интерполяции'linear' (по умолчанию) | 'nearest' | 'cubic'Метод интерполяции для использования на входном изображении, указанный как 'linear', 'nearest' , или 'cubic'.
Укажите дополнительные пары, разделенные запятыми Name,Value аргументы. Name является именем аргумента и Value - соответствующее значение. Name должен отображаться внутри кавычек. Можно указать несколько аргументов пары имен и значений в любом порядке как Name1,Value1,...,NameN,ValueN.
'FillValues',0 устанавливает выходные значения пиксельной заливки как 0.'FillValues' - Выходные значения пиксельной заливки0 (по умолчанию) | скалярный | 3-элементный векторВыходные значения пиксельной заливки, указанные как разделенная запятыми пара, состоящая из 'FillValuesи массив, содержащий одно или несколько значений заливки. Когда соответствующее место обратного преобразования во входном изображении полностью выходит за границы входного изображения, для выходных пикселей используются значения заливки. При использовании 2-D входного изображения в градациях серого необходимо установить FillValues в скаляр. Когда вы используете truecolor, FillValues может быть скаляром или 3-элементным вектором значений RGB.
'OutputView' - Размер выходного изображения'same' (по умолчанию) | 'full' | 'valid'Размер выходного изображения, указанного как разделенная запятыми пара, состоящая из 'OutputView«и» 'same', 'full', или 'valid'. При установке для свойства значения 'same', функция устанавливает выходное изображение в соответствии с размером входного изображения. При установке для свойства значения 'full', вывод включает в себя все пиксели из входного изображения. При установке для свойства значения 'valid'функция выполняет кадрирование выходного изображения, чтобы оно содержало только допустимые пикселы.
Для входного изображения:
| OutputView | Выходное изображение |
|---|---|
'same' | Соответствует размеру входного изображения.
|
'full' | Все пикселы входного изображения.
|
'valid' | Допустимы только пикселы из входного изображения.
|
Калибратор камеры | cameraIntrinsics | cameraParameters | estimateCameraParameters | extrinsics | Калибратор стереокамеры | stereoParameters | triangulate | undistortPoints