Примечание
В заключительном разделе этого исследования требуется программное обеспечение Simulink 3D Animation.
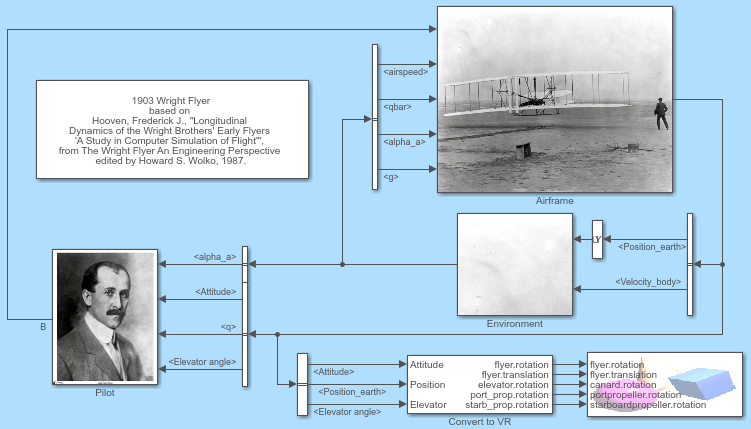
Этот пример описывает модель 1903 Райта Флайера. Построенный Орвиллом и Уилбуром Райтом, «Райт Флайер» поднялся в небо в декабре 1903 года и открыл возраст управляемого рейса. Летательная машина братьев Райт достигла следующих целей:
Оставил землю под своей степенью
Двигался вперед и поддерживал свою скорость
Приземлился на повышении не ниже места начала
Эта модель основана на более ранней симуляции [1], которая исследовала продольную устойчивость Райта Флайера и, следовательно, смоделировала только прямое и вертикальное движение вместе с углом тангажа. «Райт Флайер» страдал от многочисленных инженерных проблем, включая динамическую и статическую нестабильность. В боковом направлении Flyer имел тенденцию опрокидываться поперечными ветрами и порывами, и в продольном направлении его угол тангажа был бы волнообразным [2].
Под этими ограничениями модель воссоздает продольную динамику рейса, которую испытывали бы пилоты Wright Flyer. Поскольку они смогли контролировать боковое движение, Орвилл и Уилбур Райт смогли поддерживать относительно прямой угол тангажа.
Обратите внимание, что выполнение этой модели генерирует информационные сообщения в MATLAB® Командное окно и предупреждающие сообщения в Diagnostic Viewer. Это связано с тем, что модель иллюстрирует использование блока Assertion для указания того, что летчик ударяется о землю при посадке.
Откройте модель Райта Флайера путем ввода aeroblk_wf_3dof в командной строке MATLAB.
Подсистема Airframe моделирует динамику твёрдого тела планера Райта Флайера, включая угол атаки лифта, аэродинамические коэффициенты, силы и моменты и уравнения движения с тремя степенями свободы.
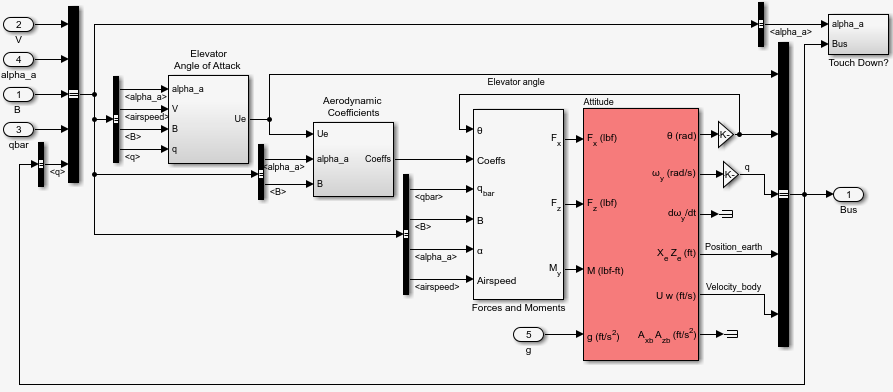
Подсистема Airframe состоит из следующих частей:
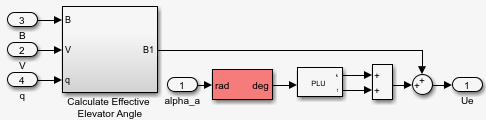
Подсистема Угол атаки лифта вычисляет эффективный угол лифта для планера Райта Флайера и подает его выход в подсистему пилота.
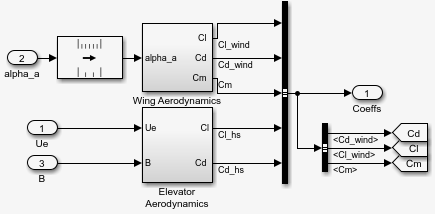
Подсистема Аэродинамических Коэффициентов содержит аэродинамические данные и уравнения для вычисления аэродинамических коэффициентов, которые суммируются и передаются Подсистеме Сил и Моментов. Сохраненные в наборах данных аэродинамические коэффициенты определяются интерполяцией с использованием блоков Prelookup.
Аэродинамические силы и моменты, действующие на планер, формируются из аэродинамических коэффициентов. Подсистема Силы и Моменты вычисляет силы тела и моменты тела, действующие на планер вокруг центра тяжести. Эти силы и моменты зависят от аэродинамических коэффициентов, тяги, динамического давления и параметров опорного корпуса.
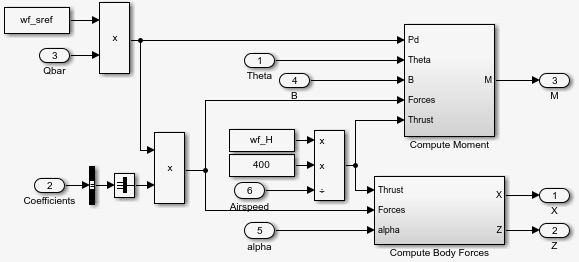
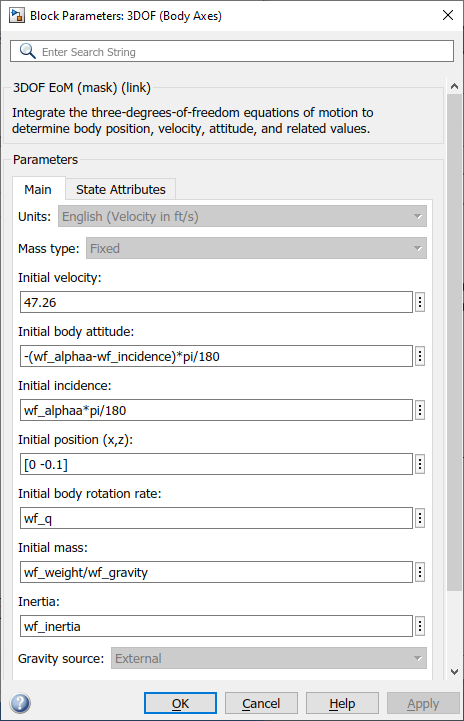
Блок 3DOF (Body Axes) использует уравнения движения, чтобы задать линейное и угловое движение планера Райта Флайера. Он также выполняет преобразования из системы осей исходной модели и осей тела.
3DOF (Ось Тела) Параметров блоков
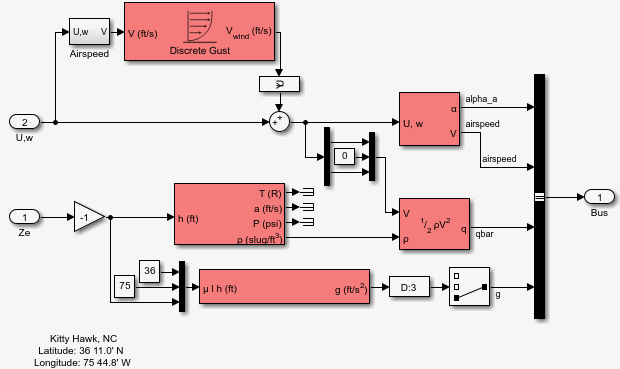
Первые и последние рейсы «Райт Флайер» произошли 17 декабря 1903 года. Орвилл и Уилбур Райт выбрали район около Китти-Хок, Северная Каролина, расположенный недалеко от атлантического побережья. В тот день были зафиксированы порывы ветра более чем на 25 миль в час. После последнего рейса в декабрьский день порывы ветра поймали и опрокинули Райт Флайер, повредив его за пределами ремонта.
Подсистема Окружения модели Райта Флайера содержит множество блоков из Окружения подсистемы программного обеспечения Aerospace Blockset™, включая ветер, атмосферу и силу тяжести, и вычисляет воздушную скорость и динамическое давление. Блок Discrete Wind Gust Model обеспечивает порывы ветра для моделируемого окружения. Другие блоки
Блок Incidence & Airspeed вычисляет угол атаки и воздушную скорость.
Блок COESA Atmosphere Model вычисляет плотность воздуха.
Блок Dynamic Pressure вычисляет динамическое давление из плотности и скорости воздуха.
Блок WGS84 Gravity Model создает силу тяжести на широте, долготе и высоте Райта Флайера.
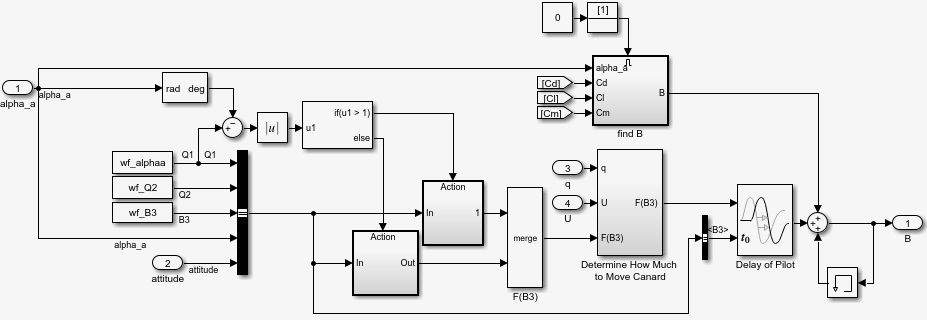
Подсистема Pilot управляет самолетом, реагируя как на угол тангажа (положение), так и на угол атаки. Если угол атаки отличается от установленного угла атаки более чем на одну степень, Подсистема Пилота реагирует коррекцией угла подъёма (канарды). Когда скорость вращения превышает +/- 0,02 рад/с, скорости вращения и угловое ускорение также берутся в фактор с дополнительными коррекциями к углу подъёма.
Время реакции пилота во многом определило успех рейсов [1]. Без автоматического контроллера время реакции 0,06 секунды оптимально для успешного рейса. Блок Delay of Pilot (Variable Transport Delay) воссоздает этот эффект, создавая задержку не более 0,08 секунды.
Значения по умолчанию для этой симуляции позволяют модели Райта Флайера успешно взлетать и приземляться. Время реакции пилота (wf_B3) устанавливается на 0.06 секунд, желаемый угол атаки (wf_alphaa) является постоянным, и достигнутая высота является низкой. Модель Райта Флайера реагирует аналогично фактической модели Райта Флайера. Он покидает землю, движется вперед и приземляется на такой высокой точке, с которой он начинался. Эта модель показывает продольную волнообразность в отношении исходного самолета.
Ориентация Возможностей (измеряется в радианах)
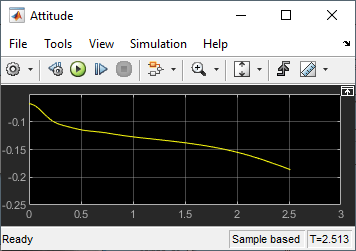
Пилот с быстрым временем реакции и идеальными условиями рейса позволяет успешно управлять «Райт Флайер». Модель Райта Флайера подтверждает, что управление ее продольным движением было серьезной проблемой. Самый длительный зарегистрированный рейс в этот день длился всего 59 секунд и преодолел 852 фута.
Примечание
Этот раздел требует Simulink 3D Animation.
Модель Райта Флайера также обеспечивает виртуальную мировую визуализацию, закодированную на языке моделирования виртуальной реальности (VRML) [3]. Блок VR Sink (Simulink 3D Animation) в основной модели позволяет вам просмотреть движение рейса в трёх размерностях.
1903 Мир виртуальной реальности Райта Флайера
[1] Hooven, Frederick J., «Longitudinal Dynamics of the Wright Brothers 'Early Flyers: A Study in Computer Simulation of Flight», The Wright Flyer: An Engineering position pution, edition Press, edition, 1987.
[2] Culick, F. E. C. and H. R. Jex, «Aerodynamics, Stability and Control of the 1903 Wright Flyer», The Wright Flyer: An Engineering Perspective, ed. Howard S. Wolko, Smithsonian Institution Press, 1987.
[3] Таддеус Бейер создал начальную модель Райта Флайера в формате Inventor, а Тимоти Рохали преобразовал её в VRML.
