В этом примере показано, как использовать PID Tuner для разработки контроллера для объекта:
Требования к проекту предназначены для системы закрытого цикла, чтобы отслеживать вход ссылки с временем нарастания менее 1,5 с и время урегулирования менее 6 с.
В этом примере объект представляется как модель LTI. Для получения информации об использовании PID Tuner для настройки блока PID Controller в Simulink® модель, см. «Настройка ПИД-регулятора для отслеживания уставки» или «Подавление помех» (Simulink Control Design).
Создайте модель завода и откройте PID Tuner, чтобы спроектировать ПИ-контроллер для проекта первого прохода.
sys = zpk([],[-1 -1 -1],1); pidTuner(sys,'pi')
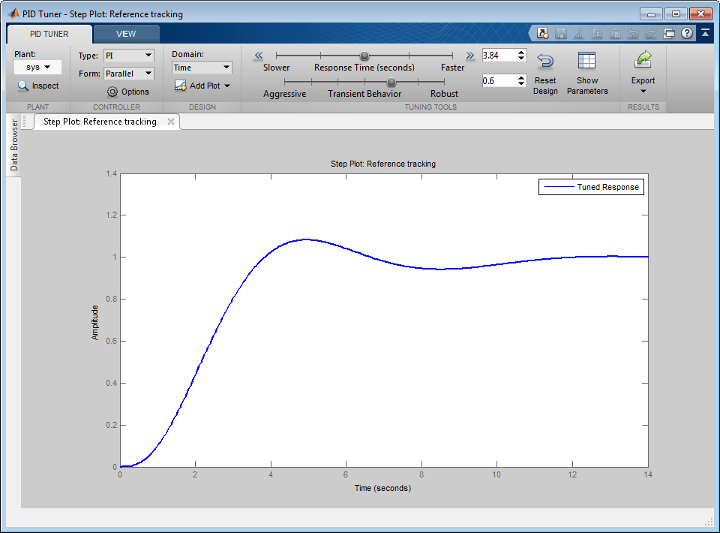
Когда вы открываете PID Tuner, он автоматически проектирует контроллер заданного типа (здесь, PI). Контроллер предназначен для баланса между эффективностью (временем отклика) и робастностью (запасами устойчивости). PID Tuner отображает переходную характеристику системы с обратной связью с разработанным контроллером.
Совет
Можно также открыть PID Tuner из MATLAB® рабочего стола, на вкладке Apps. Когда вы делаете это, используйте меню Plant в PID Tuner, чтобы задать свою модель объекта управления.
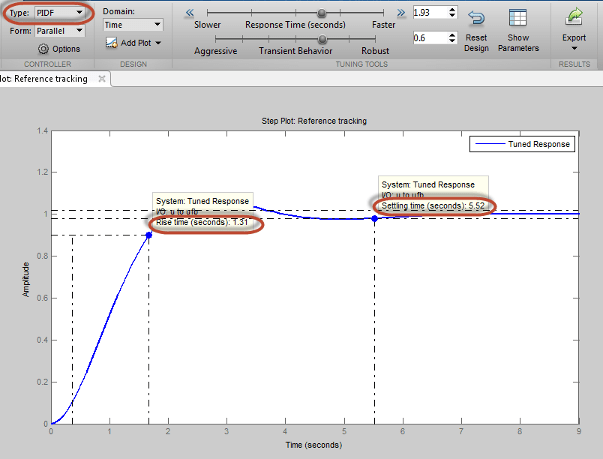
Исследуйте время подъема отслеживания уставки и времени урегулирования.
Щелкните правой кнопкой мыши на графике и выберите Characteristics > Rise Time чтобы отметить время нарастания как синюю точку на графике. Выберите Characteristics > Settling Time чтобы отметить время урегулирования. Чтобы увидеть всплывающие подсказки с числовыми значениями, щелкните каждую из синих точек.
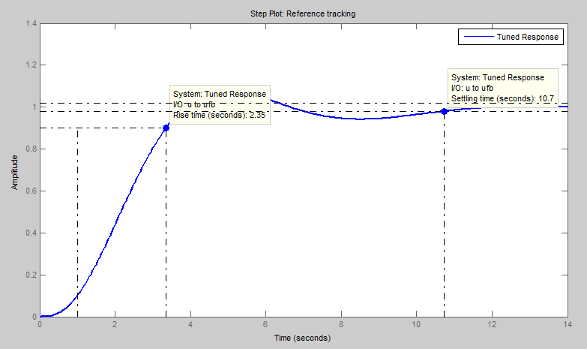
Первоначальная конструкция ПИ-контроллера обеспечивает время нарастания 2,35 с и время урегулирования 10,7 с. Оба результата медленнее, чем требования проекта.
Примечание
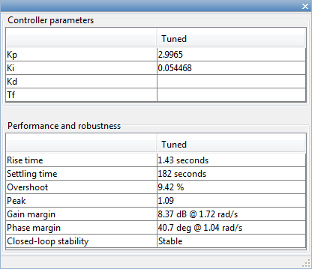
Чтобы отобразить метрики эффективности в таблице вместо в всплывающих подсказках на графике, нажмите Show parameters. Это действие открывает отображение, содержащую метрики эффективности и робастности и настроенные усиления контроллера.
Сдвиньте Response time ползунок вправо, чтобы попытаться улучшить эффективность цикла. График отклика автоматически обновляется новым проектом.
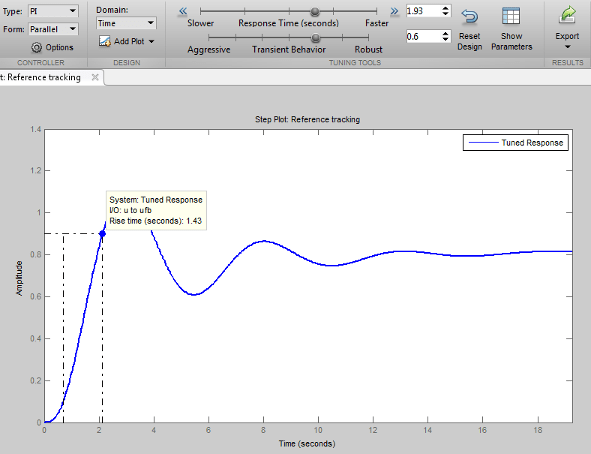
Перемещение Response time ползунка достаточно далеко, чтобы удовлетворить время нарастания менее 1,5 с, приводит к большему колебанию. Кроме того, отображение параметров показывает, что новый ответ имеет недопустимо длительное время урегулирования.
Чтобы достичь более высокой скорости отклика, алгоритм должен пожертвовать стабильностью.
Измените тип контроллера, чтобы улучшить ответ.
Добавление производного действия к контроллеру дает PID Tuner больше свободы для достижения адекватного запаса по фазе с желаемой скоростью отклика.
В Type меню выберите PIDF. PID Tuner проектирует новый контроллер. (Для получения дополнительной информации о доступных типах контроллеров см. раздел «Тип ПИД-регулятора»).
Теперь времена нарастания и время урегулирования отвечают проект требованиям. Можно использовать ползунок Response time для дальнейших корректировок отклика. Чтобы вернуться к результату автоматической настройки по умолчанию, нажмите Reset Design.
Примечание
Чтобы настроить полосу пропускания замкнутой системы вместо времени отклика, выберите Frequency domain из Design mode меню. Шумовая полоса обратно пропорциональна времени отклика.
При необходимости анализируйте другие отклики системы.
Чтобы проанализировать другие отклики системы, нажмите Add Plot. Выберите отклик системы, который необходимо проанализировать.
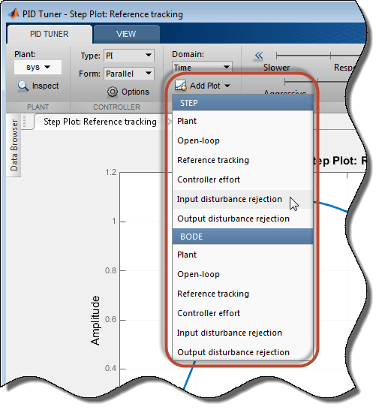
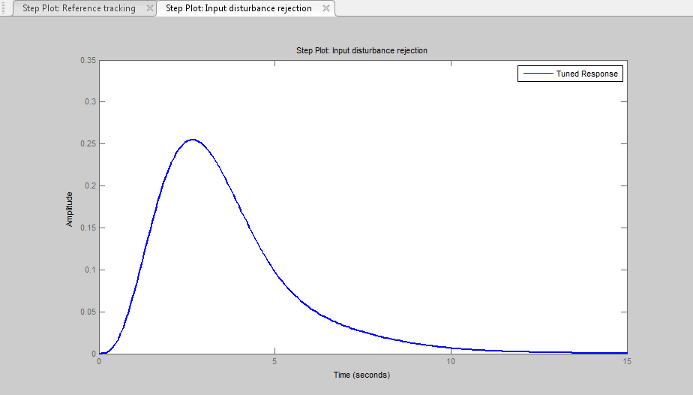
Например, чтобы наблюдать переходную реакцию с обратной связью на возмущение на входе объекта, в разделе Step меню Add Plot выберите Input disturbance rejection. Реакция подавления помех появляется на новом рисунке.
Смотрите Analyze Design в PID Tuner для получения дополнительной информации о доступных графиках отклика.
Совет
Используйте опции на вкладке View, чтобы изменить способ отображения PID Tuner нескольких графиков.
Экспортируйте проектирование контроллера в Рабочее пространство MATLAB.
Чтобы экспортировать последнее проектирование контроллера в рабочее пространство MATLAB, нажмите![]() Export. PID Tuner экспортирует контроллер как
Export. PID Tuner экспортирует контроллер как
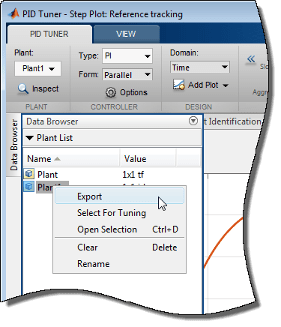
Также можно экспортировать модель с помощью контекстного меню в Data Browser. Для этого перейдите на вкладку Data Browser.
Затем щелкните правой кнопкой мыши модель и выберите Export.