Обратной и разомкнутой реакции систем с ПИД-контроллерами
response = getPIDLoopResponse(C,G,looptype)C и объект G. Функция возвращает ответ замкнутого цикла, разомкнутого контура, действия контроллера или нарушения порядка, который вы задаете с looptype аргумент. Функция принимает следующую архитектуру управления.
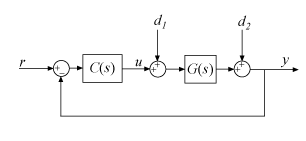
Когда C является pid или pidstd Объект контроллера (1-DOF контроллер):
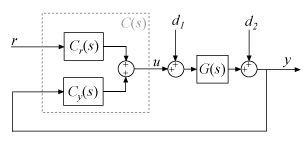
Когда C является pid2 или pidstd2 Объект контроллера (2-DOF контроллер):
Разработайте ПИ-контроллер для объекта SISO и исследуйте его эффективность в отслеживании и подавлении помех уставки. Для отслеживания уставки используйте "closed-loop" ответ. Для отказа от нарушения порядка нагрузки используйте "input-disturbance".
G = tf(1,[1 1 1]); C = pidtune(G,'PI'); Tref = getPIDLoopResponse(C,G,"closed-loop"); Tdist = getPIDLoopResponse(C,G,"input-disturbance"); step(Tref,Tdist) legend("Reference Tracking","Disturbance Rejection")

Проверьте настроенный контроллер путем сравнения извлеченных ответов с требованиями вашего проекта для времени урегулирования и перерегулирования.
Проектируйте ПИД-регулятор с двумя степенями свободы (2-DOF) для объекта и исследуйте его эффективность при отслеживании уставки и подавлении помех. Для отслеживания уставки используйте "closed-loop" ответ. Для отказа от нарушения порядка нагрузки используйте "input-disturbance".
G = tf(1,[1 0.5 0.1]); w0 = 1.5; C = pidtune(G,'PID2',w0); Tref = getPIDLoopResponse(C,G,"closed-loop"); Tdist = getPIDLoopResponse(C,G,"input-disturbance"); step(Tref,Tdist) legend("Reference Tracking","Disturbance Rejection")

