Создайте модель пространства состояний с внутренними задержками
sys = setDelayModel(H,tau)
sys = setDelayModel(A,B1,B2,C1,C2,D11,D12,D21,D22,tau)
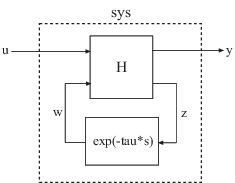
sys = setDelayModel(H,tau)sys полученное соединением LFT модели пространства состояний H с вектором внутренних задержек tau, как показано:
sys = setDelayModel(A,B1,B2,C1,C2,D11,D12,D21,D22,tau)sys описывается следующими уравнениями:
tau (τ) является вектором внутренних задержек в sys.
|
Пространство состояний ( |
|
Вектор внутренних задержек Для моделей в непрерывном времени выразите Для моделей в дискретном времени выразите |
|
Набор матриц пространства состояний, которые с вектором внутренней задержки |
setDelayModel является расширенной операцией и не является естественным способом создания моделей с внутренними задержками. Рекомендуемые способы создания внутренних задержек см. в разделе Задержки в линейных системах.
Синтаксис sys = setDelayModel(A,B1,B2,C1,C2,D11,D12,D21,D22,tau) создает модель в непрерывном времени. Можно создать модель в дискретном времени, описанную уравнениями в пространстве состояний
Для этого сначала создайте sys использование sys = setDelayModel(A,B1,B2,C1,C2,D11,D12,D21,D22,tau). Затем используйте sys.Ts для установки шага расчета.
