Усильте пассивность частотно-взвешенной передаточной функции при настройке в Control System Tuner.
Взвешенная Цель Пассивности проводит в жизнь пассивность H (<reservedrangesplaceholder17>) = WL (<reservedrangesplaceholder15>) T (<reservedrangesplaceholder13>) WR (<reservedrangesplaceholder11>), где T (<reservedrangesplaceholder9>) является передаточной функцией от указанных входов до выходов. WL (s) и WR (s) являются весами частот, используемыми для подчеркивания конкретных полос частот. Система passive, если все ее вводы-выводы траектории (u (t), y (t)) удовлетворяют:
для всех T > 0. Взвешенная цель пассивности создает ограничение, которое применяет:
для траекторий взвешенной передаточной функции H (s), для всех T > 0. Чтобы применить общее условие пассивности, установите минимальный входной индекс пассивности (ν) и минимальный выходной индекс пассивности (ρ) равными нулю. Чтобы применить избыток пассивности на входах или выходах взвешенной передаточной функции, задайте ν или ρ положительное значение. Чтобы разрешить дефицит пассивности, установите ν или ρ отрицательное значение. ПосмотритеgetPassiveIndex для получения дополнительной информации об этих индексах.
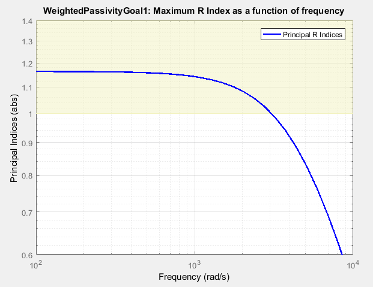
В Control System Tuner затененная область на графике представляет область в частотный диапазон, в которой цель настройки не достигается. График показывает значение индекса, описанного в Алгоритмах.
На Tuning вкладке Control System Tuner выберите New Goal > Weighted Passivity Goal.
При настройке систем управления в командной строке используйте TuningGoal.WeightedPassivity для задания переходной характеристики цели.
Используйте этот раздел диалогового окна, чтобы задать входы и выходы передаточной функции, которые ограничиваются целями настройки. Также задайте любые местоположения, в которых можно открыть контуры для оценки цели настройки.
Specify input signals
Выберите одно или несколько местоположений сигнала в модели в качестве входов в передаточную функцию, которую ограничивает цель настройки. Чтобы ограничить ответ SISO, выберите однозначный входной сигнал. Например, чтобы ограничить коэффициент усиления из местоположения с именем 'u' в местоположение с именем 'y', нажмите![]() Add signal to list и выберите 'u'
Add signal to list и выберите 'u'. Чтобы ограничить пассивность отклика MIMO, выберите несколько сигналов или векторный сигнал.
Specify output signals
Выберите одно или несколько местоположений сигнала в модели в качестве выходов передаточной функции, которую ограничивает цель настройки. Чтобы ограничить ответ SISO, выберите однозначный выходной сигнал. Например, чтобы ограничить коэффициент усиления из местоположения с именем 'u' в местоположение с именем 'y', нажмите![]() Add signal to list и выберите 'y'
Add signal to list и выберите 'y'. Чтобы ограничить пассивность отклика MIMO, выберите несколько сигналов или векторный сигнал.
Compute input/output gain with the following loops open
Выберите в модели одно или несколько местоположений сигнала, в которых можно открыть цикл обратной связи для оценки этой цели настройки. Цель настройки оценивается относительно строения разомкнутого контура, созданной открытием циклов обратной связи в идентифицируемых вами местах. Например, чтобы вычислить цель настройки с открытием в местоположении с именем 'x', нажмите![]() Add signal to list и выберите 'x'
Add signal to list и выберите 'x'.
Совет
Чтобы выделить любой выбранный сигнал в Simulink® модель, click. ![]() Чтобы удалить сигнал из входного или выходного списка, нажмите.
Чтобы удалить сигнал из входного или выходного списка, нажмите. ![]() Когда вы выбрали несколько сигналов, можно переупорядочить их, используя
Когда вы выбрали несколько сигналов, можно переупорядочить их, используя![]() и.
и. ![]() Для получения дополнительной информации о том, как задать местоположения сигналов для цели настройки, смотрите Задать цели для интерактивной настройки.
Для получения дополнительной информации о том, как задать местоположения сигналов для цели настройки, смотрите Задать цели для интерактивной настройки.
Используйте Left weight WL и Right weight WR текстовые поля, чтобы задать функции взвешивания частот для цели настройки. H (s) = WL (s) T (s) WR (s), где T (s) - передаточная функция от заданных входов к выходам.
WL обеспечивает взвешивание для каналов выхода H (s), а WR обеспечивает взвешивание для каналов входа. Можно задать скалярные веса или частотно-зависимое взвешивание. Чтобы задать частотно-зависимое взвешивание, используйте числовую модель LTI, величина которой представляет желаемую функцию взвешивания. Для примера введите tf(1,[1 0.01]) задать высокий вес на низких частотах, который скатывается выше 0,01 рад/с.
Если цель настройки ограничивает передаточную функцию MIMO, скалярные или SISO взвешивания автоматически расширяются до любой входной или выходной размерности. Можно задать различные веса для каждого канала, задав матрицы или функции взвешивания MIMO. Размерности H (s) должна быть соизмерима с размерностями WL и WR. Для примера, если ограниченная передаточная функция имеет два входов, можно задать diag([1 10]) как WR.
Если вы настраиваете в дискретном времени, можно задать функции взвешивания как модели в дискретном времени с тем же временем дискретизации, как вы используете для настройки. Если вы задаете функции взвешивания за непрерывное время, программа настройки дискретизирует их. Установка функций взвешивания в дискретном времени дает вам больше контроля над функциями взвешивания вблизи частоты Найквиста.
Используйте этот раздел диалогового окна, чтобы задать дополнительные характеристики цели переходной характеристики.
Minimum input passivity index
Введите целевое значение ν в текстовое поле. Чтобы применить избыток пассивности при заданных входах, установите ν > 0. Чтобы допустить нехватку пассивности, установите ν < 0. По умолчанию цель пассивности применяет ν = 0, пассивно на входах без необходимого превышения пассивности.
Minimum output passivity index
Введите целевое значение ρ в текстовое поле. Чтобы применить избыток пассивности на заданных выходах, установите ρ > 0. Чтобы допустить нехватку пассивности, установите ρ < 0. По умолчанию цель пассивности принудительно применяет ρ = 0, пассивно на выходах без необходимого превышения пассивности.
Enforce goal in frequency range
Ограничьте принудительное применение цели настройки конкретной полосой частот. Задайте полосу частоты как вектор-строка вида [min,max], выраженная в частотных модулях вашей модели. Например, чтобы создать цель настройки, которая применяется только между 1 и 100 рад/с, введите [1,100]. По умолчанию цель настройки применяется на всех частотах для непрерывного времени и вплоть до частоты Найквиста для дискретного времени.
Apply goal to
Используйте эту опцию при настройке нескольких моделей сразу, таких как массив моделей, полученных путем линеаризации модели Simulink в различных рабочих точках или значениях параметров блоков. По умолчанию активные цели настройки применяются для всех моделей. Чтобы применить требование настройки для подмножества моделей в массиве, выберите Only Models. Затем введите индексы массива моделей, для которых применяется цель. Например, предположим, что вы хотите применить цель настройки ко второй, третьей и четвертой моделям в массиве моделей. Чтобы ограничить применение требования, введите 2:4 в Only Models текстовом поле.
Для получения дополнительной информации о настройке для нескольких моделей см. «Робастные подходы к настройке» (Robust Control Toolbox).
Когда вы настраиваете систему управления, программное обеспечение преобразует каждую цель настройки в нормализованное скалярное значение f (x). Здесь x является вектором свободных (настраиваемых) параметров в системе управления. Затем программа настраивает значения параметров, чтобы минимизировать f (x) или привести f (x) ниже 1, если цель настройки является жестким ограничением.
Для Weighted Passivity Goal, для передаточной функции с обратной связью T (s, x) от указанных входов до указанных выходов и взвешенной передаточной функции H (s, x) = WL (<reservedrangesplaceholder7>) T (s, x) WR (<reservedrangesplaceholder2>), f (<reservedrangesplaceholder0>) дают:
R - относительный индекс сектора (см. getSectorIndex) [H (s, x); I], для сектора, представленного :
где ρ - минимальный индекс пассивности выхода, а ν - минимальный индекс пассивности входа, заданный в диалоговом окне. R max зафиксировано на 106, включено, чтобы избежать числовых ошибок для очень больших R.
Эта цель настройки накладывает неявное ограничение минимальной фазы на взвешенную передаточную функцию H + I. Нули передачи H + I являются stabilized dynamics для этой цели настройки. Опции Minimum decay rate и Maximum natural frequency настройки управляют нижней и верхней границами на этих неявно ограниченной динамике. Если оптимизация не соответствует границам по умолчанию или если границы по умолчанию конфликтуют с другими требованиями, на вкладке Tuning используйте Tuning Options, чтобы изменить значения по умолчанию.
