Этот пример показывает, как аппроксимировать задержки в системе разомкнутого контура в непрерывном времени, используя pade.
Приближение Padé полезно при использовании инструментов анализа или проекта, которые не поддерживают задержки времени.
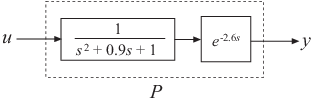
Создайте образец разомкнутого контура системы с выходом задержкой.
s = tf('s');
P = exp(-2.6*s)/(s^2+0.9*s+1);P является передаточной функцией второго порядка (tf) объект с временной задержкой.
Вычислите приближение Паде первого порядка P.
Pnd1 = pade(P,1)
Pnd1 =
-s + 0.7692
----------------------------------
s^3 + 1.669 s^2 + 1.692 s + 0.7692
Continuous-time transfer function.
Эта команда заменяет все задержки в P с приближением первого порядка. Поэтому Pnd1 является передаточной функцией третьего порядка без задержек.
Сравните частотную характеристику исходной и приблизительной моделей, используя bodeplot.
h = bodeoptions; h.PhaseMatching = 'on'; bodeplot(P,'-b',Pnd1,'-.r',{0.1,10},h) legend('Exact delay','First-Order Pade','Location','SouthWest')

Величина P и Pnd1 точно соответствовать. Однако фаза Pnd1 отклоняется от фазы P за пределами примерно 1 рад/с.
Увеличьте приближение Padé, чтобы расширить частотную полосу, в котором фаза приближения хороша.
Pnd3 = pade(P,3);
Сравните частотную характеристику P, Pnd1 и Pnd3.
bodeplot(P,'-b',Pnd3,'-.r',Pnd1,':k',{0.1 10},h) legend('Exact delay','Third-Order Pade','First-Order Pade',... 'Location','SouthWest')

Ошибка приближения фазы уменьшается при помощи приближения Паде третьего порядка.
Сравните отклики во временном интервале исходной и аппроксимированной систем, используя stepplot.
stepplot(P,'-b',Pnd3,'-.r',Pnd1,':k') legend('Exact delay','Third-Order Pade','First-Order Pade',... 'Location','Southeast')

Использование приближения Паде вводит неминимальный программный продукт фазы (эффект «неправильного пути») в начальном переходном процессе. Эффект довольно выражен в приближении первого порядка, которое значительно опускается ниже нуля перед изменением направления. Эффект уменьшается в приближении более высокого порядка, которая намного более близко соответствует точной реакции системы.
Примечание
Использование слишком высокого порядка приближения может привести к численным проблемам и, возможно, нестабильным полюсам. Поэтому избегайте приближений Паде с порядком N > 10.
