Интерполируйте положения вдоль запланированного пути к транспортному средству
poses = interpolate(refPath)
[ также возвращает направления движения транспортного средства в каждом положении, используя входы от любого из предыдущих синтаксисов.poses,directions] = interpolate(___)
Планируйте путь автомобиля через парковку с помощью оптимального быстро исследующего алгоритма случайного дерева (RRT *). Проверьте правильность пути, а затем постройте график положения перехода вдоль пути.
Загрузите косметику парковки. Постройте косметику, чтобы увидеть парковку и раздутые области для транспортного средства, чтобы избежать.
data = load('parkingLotCostmap.mat');
costmap = data.parkingLotCostmap;
plot(costmap)
Задайте начальное и целевое положения для транспортного средства как векторы [x, y, Мировые единицы измерения (x, y) указаны в метрах. Мировые единицы измерения для углов ориентации в степенях.
startPose = [4, 4, 90]; % [meters, meters, degrees]
goalPose = [30, 13, 0];Использование pathPlannerRRT объект для планирования пути от начального положения до положения цели.
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
Проверьте правильность пути.
isPathValid = checkPathValidity(refPath,costmap)
isPathValid = logical
1
Интерполируйте положения перехода вдоль пути.
transitionPoses = interpolate(refPath);
Постройте график запланированного пути и положения перехода на косметике.
hold on plot(refPath,'DisplayName','Planned Path') scatter(transitionPoses(:,1),transitionPoses(:,2),[],'filled', ... 'DisplayName','Transition Poses') hold off

Планируйте путь автомобиля через парковку с помощью быстро исследующего алгоритма случайного дерева (RRT *). Интерполируйте положения транспортного средства в точках вдоль пути.
Загрузите косметику парковки. Постройте косметику, чтобы увидеть парковку и раздутые области для транспортного средства, чтобы избежать.
data = load('parkingLotCostmap.mat');
costmap = data.parkingLotCostmap;
plot(costmap)
Задайте начальное и целевое положения для транспортного средства как [x, y, и ] векторы. Мировые единицы измерения (x, y) указаны в метрах. Мировые единицы измерения для углов ориентации в степенях.
startPose = [4, 4, 90]; % [meters, meters, degrees]
goalPose = [30, 13, 0]; Использование pathPlannerRRT объект для планирования пути от начального положения до положения цели.
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
Интерполируйте положения транспортного средства каждые 1 метр вдоль всего пути.
lengths = 0 : 1 : refPath.Length; poses = interpolate(refPath,lengths);
Постройте график интерполированных положений на косметике.
plot(costmap) hold on scatter(poses(:,1),poses(:,2),'DisplayName','Interpolated Poses') hold off

Путь состоит из нескольких сегментов, которые являются комбинациями движений (для примера, поворота влево, прямого и поворота вправо). Transition poses являются положениями транспортного средства, соответствующими концу одного движения и началу другого движения. Они представляют точки вдоль пути, соответствующего изменению направления или ориентации транспортного средства. interpolate функция всегда возвращает переходные положения, даже если вы интерполируете только в заданных точках вдоль пути.
Длина пути между переходными положениями задается MotionLengths свойство сегментов контура. Например, рассмотрим следующий путь, который является driving.Path объект, состоящий из одного сегмента контура Дубинса. Этот сегмент состоит из трех движений, как описано в MotionLengths и MotionTypes свойства сегмента.
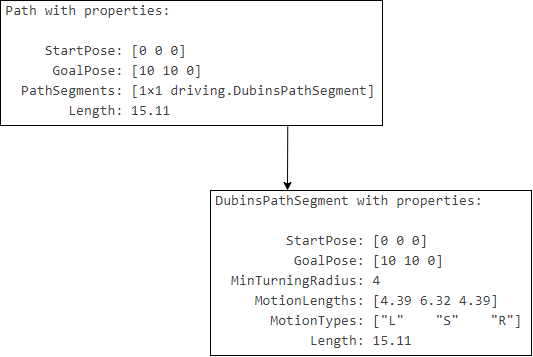
interpolate функция интерполирует следующие переходные положения в этом порядке:
Начальное положение транспортного средства, StartPose.
Положение после поворота транспортного средства налево ("L") на 4,39 метра при максимальном угле поворота руля.
Положение после того, как транспортное средство идет прямо ("S") на 6,32 метра.
Положение после поворота транспортного средства вправо ("R") на 4,39 метра при максимальном угле поворота руля. Это положение также является целевым положением, потому что это последнее положение всего пути.
График показывает эти переходные положения, которые являются векторами [x, y, Θ]. x и y указать местоположение транспортного средства в мировых единицах измерения, таких как метры. Θ задает угол ориентации транспортного средства в степенях.
![]()
