

Обнаруживайте сигналы с помощью датчиков, установленных на платформе
dets = detect(ptfm,time)dets, со всех датчиков, установленных на платформе, ptfm, при заданной time. Этот синтаксис применяется, когда датчики не требуют знания каких-либо сигналов, присутствующих в сценарии, например, когда fusionRadarSensor свойство объекта HasInterference установлено в false.
dets = detect(ptfm,signals,time)signals, присутствует в сценарии. Этот синтаксис применяется, когда датчики требуют знания этих сигналов, например, когда radarSensor объект сконфигурирован как EM-датчик.
dets = detect(ptfm,signals,emitterconfigs,time)emitterconfigs. Этот синтаксис применяется, когда датчики требуют знания строений излучателей, генерирующих сигналы в сценарии. Для примера, когда fusionRadarSensor объект сконфигурирован как моностатический радар.
[ также возвращает все строения датчика, dets,numDets,sensorconfigs] = detect(___)sensorconfigs. Этот выходной синтаксис может использоваться с любым из входных синтаксисов.
В этом разделе описывается структура обнаружений объектов.
Датчик измеряет координаты цели. The Measurement и MeasurementNoise значения сообщаются в системе координат, заданной DetectionCoordinates свойство датчика.
Когда DetectionCoordinates свойство 'Scenario', 'Body', или 'Sensor rectangular', а Measurement и MeasurementNoise значения сообщаются в прямоугольных координатах. Скорости сообщаются только тогда, когда свойство скорости области значений, HasRangeRate, есть true.
Когда DetectionCoordinates свойство 'Sensor spherical', а Measurement и MeasurementNoise значения сообщаются в сферической системе координат, полученной из прямоугольной системы координат датчика. Повышение и частота области значений сообщаются только при HasElevation и HasRangeRate являются true.
Измерения упорядочиваются как [азимут, повышение, диапазон, скорость области значений]. Отчетность о повышении и скорости области значений зависит от соответствующих HasElevation и HasRangeRate значения свойств. Углы указаны в степенях, область значений - в метрах, а частота областей значений - в метрах в секунду.
Координаты измерения
| DetectionCoordinates | Координаты шума измерений и измерений | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
'Scenario' | Координатная зависимость от
| |||||||||||||||
'Body' | ||||||||||||||||
'Sensor rectangular' | ||||||||||||||||
'Sensor spherical' | Координатная зависимость от
|
The MeasurementParameters свойство состоит из массива структур, которые описывают последовательность преобразований координат из дочерней системы координат в родительскую систему координат или обратные преобразования (см. Вращение системы координат). В большинстве случаев самой длинной необходимой последовательностью преобразований является сценарий Sensor → Platform →.
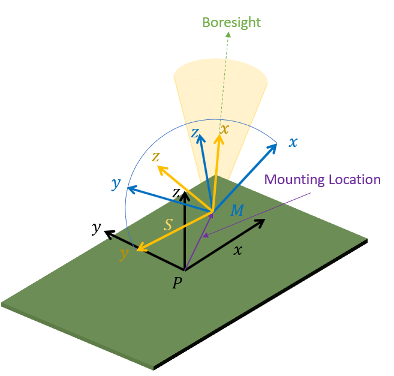
Если обнаружения сообщаются в сферических координатах и HasINS датчика установлено в falseтогда последовательность состоит только из одного преобразования от датчика к платформе. В преобразовании OriginPosition совпадает с MountingLocation свойство датчика. The Orientation состоит из двух последовательных вращений. Первое вращение, соответствующее MountingAngles свойство датчика, учитывает вращение от системы координат платформы (P) к монтажной системе координат датчика (M). Второе вращение, соответствующее азимуту и углам возвышения датчика, учитывает вращение от монтажной системы координат (M) датчика к сканирующей системе координат (S) датчика. В S системе координат x направление является направлением boresight, а y направление лежит внутри x - y плоскости монтажной системы координат датчика (M).
Если HasINS является trueпоследовательность преобразований состоит из двух преобразований - сначала формируйте систему координат сценария в систему координат платформы, затем из системы координат платформы в систему координат сканирования датчика. В первом преобразовании Orientation - поворот от системы координат сценария к системе координат платформы и OriginPosition - положение системы координат платформы относительно системы координат сценария.
Тривиально, если обнаружения сообщаются в прямоугольных координатах и HasINS платформы установлено в false, преобразование состоит только из тождеств.
Поля MeasurementParameters показаны здесь. Не все поля должны присутствовать в структуре. Набор полей и их значения по умолчанию могут зависеть от типа датчика.
| Область | Описание |
Frame | Перечисленный тип, указывающий на систему координат, используемую для сообщения измерений. Когда о обнаружениях сообщают с помощью прямоугольной системы координат, |
OriginPosition | Смещение положения источника дочерней системы координат относительно родительской системы координат, представленное в виде вектора 3 на 1. |
OriginVelocity | Смещение скорости источника дочерней системы координат относительно родительской системы координат, представленное в виде вектора 3 на 1. |
Orientation | Матрица поворота 3 на 3 вещественные ортонормальные системы координат. Направление вращения зависит от |
IsParentToChild | Логический скаляр, указывающий, |
HasElevation | Логический скаляр, указывающий, включено ли в измерение повышение высоты. Для измерений, сообщаемых в прямоугольной системе координат, и если |
HasAzimuth | Логический скаляр, указывающий, включен ли азимут в измерение. |
HasRange | Логический скаляр, указывающий, включена ли область значений в измерение. |
HasVelocity | Логический скаляр, указывающий, включают ли сообщенные обнаружения измерения скорости. Для измерений, сообщаемых в прямоугольной системе координат, если |
Атрибуты объекта содержат дополнительную информацию об обнаружении:
| Признак | Описание |
TargetIndex | Идентификатор платформы, |
SNR | Отношение сигнала обнаружения к шуму в дБ. |
emit | pose | targetPoses