Сгенерируйте обнаружения и отслеживайте отчеты
The fusionRadarSensor Системная object™ генерирует обнаружение или отслеживает отчеты о целях. Можно задать режим обнаружения датчика как моностатические, бистатические или электронные меры поддержки (ESM) через DetectionMode свойство. Можно использовать fusionRadarSensor моделировать кластеризованные или незащищенные обнаружения с добавлением случайного шума, а также генерировать ложные обнаружения предупреждений. Можно сплавить сгенерированные обнаружения с другими данными о датчике и отслеживать объекты с помощью трекера мультиобъекта, такого как trackerGNN. Можно также выводить дорожки непосредственно из fusionRadarSensor объект. Чтобы настроить вывод целевых объектов в виде кластеризованных обнаружений, незакластеризованных обнаружений или треков, используйте TargetReportFormat свойство. Можно добавить fusionRadarSensor в Platform а затем используйте радар в trackingScenario.
Используя одноэкспоненциальную модель, радар вычисляет смещения области значений и повышения, вызванные распространением через тропосферу. Смещение области значений означает, что измеренные диапазоны больше, чем диапазон линии видимости до цели. Смещение по повышению означает, что измеренные повышения находятся выше их истинных повышений. Смещения больше, когда путь линии визирования между радаром и целью проходит через более низкие высоты, потому что атмосфера толще на этих высотах. Для получения дополнительной информации см. ссылки».
Для формирования отчетов о радиолокационном обнаружении и отслеживании:
Создайте fusionRadarSensor Объекту и установите его свойства.
Вызывайте объект с аргументами, как будто это функция.
Дополнительные сведения о работе системных объектов см. в разделе «Что такое системные объекты?».
rdr = fusionRadarSensor
rdr = fusionRadarSensor(id)id.
rdr = fusionRadarSensor(___,scanConfig)scanConfig. Можно задать scanConfig как 'No scanning', 'Raster', 'Rotator', или 'Sector'. Для получения дополнительной информации об этих строениях см. раздел «Синтаксис удобства».
rdr = fusionRadarSensor(___,Name,Value)radarDataGenerator('TargetReportFormat','Tracks','FilterInitializationFcn',@initcvkf) создает радарный датчик, который генерирует отчеты о дорожках с помощью трекера, инициализированного линейным фильтром Калмана с постоянной скоростью.
Эти синтаксисы применяются, когда вы устанавливаете DetectionMode свойство к 'Monostatic'.
reports = rdr(targetPoses,simTime)reports из целевых положений, targetPoses, во время текущей симуляции, simTime. Объект может генерировать отчеты для нескольких целей. Чтобы включить этот синтаксис:
Установите DetectionMode свойство к 'Monostatic'.
Установите InterferenceInputPort свойство к false.
Установите EmissionsInputPort свойство к false.
reports = rdr(targetPoses,interferences,simTime)interferences, в передаче радиолокационного сигнала. Чтобы включить этот синтаксис:
Установите DetectionMode свойство к 'Monostatic'.
Установите InterferenceInputPort свойство к true.
Установите EmissionsInputPort свойство к false.
reports = rdr(emissions,emitterConfigs,simTime)emissions, и строения соответствующих излучателей, emitterConfigs, которые генерируют выбросы. Чтобы включить этот синтаксис:
Установите DetectionMode свойство к 'Monostatic'.
Установите InterferenceInputPort свойство к false.
Установите EmissionsInputPort свойство к true.
Этот синтаксис применяется при установке DetectionMode свойство к 'Bistatic' или 'ESM'. В этих двух режимах TargetReportFormat можно только 'Detections' и DetectionCoordinates можно только 'Sensor spherical'.
Этот синтаксис применяется при установке HasINS свойство к true.
[___] = rdr(___, определяет информацию о положении радиолокационной платформы посредством оценки INS. Заметьте, что insPose,simTime)insPose аргумент является вторым к последнему аргументу перед simTime аргумент. Этот синтаксис можно использовать с любым из предыдущих синтаксисов. Дополнительные сведения см. в свойстве HasINS.
Используйте этот синтаксис для вывода дополнительной информации об отчетах.
[ возвращает количество отчетов, reports,numReports,config] = rdr(___)numReports, и строение радара, config, во время текущей симуляции.
Чтобы использовать функцию объекта, задайте Системную object™ в качестве первого входного параметра. Например, чтобы освободить системные ресурсы системного объекта с именем obj, используйте следующий синтаксис:
release(obj)
Создайте три цели путем определения их идентификатора платформы, положения и скорости.
tgt1 = struct('PlatformID',1, ... 'Position',[0 -50e3 -1e3], ... 'Velocity',[0 900*1e3/3600 0]); tgt2 = struct('PlatformID',2, ... 'Position',[20e3 0 -500], ... 'Velocity',[700*1e3/3600 0 0]); tgt3 = struct('PlatformID',3, ... 'Position',[-20e3 0 -500], ... 'Velocity',[300*1e3/3600 0 0]);
Создайте радар наблюдения аэропорта, который находится на высоте 15 метров над землей.
rpm = 12.5; fov = [1.4; 5]; % [azimuth; elevation] scanrate = rpm*360/60; % deg/s updaterate = scanrate/fov(1); % Hz sensor = fusionRadarSensor(1,'Rotator', ... 'UpdateRate',updaterate, ... 'MountingLocation',[0 0 -15], ... 'MaxAzimuthScanRate',scanrate, ... 'FieldOfView',fov, ... 'AzimuthResolution',fov(1));
Сгенерируйте обнаружения от полного скана радара.
simTime = 0;
detBuffer = {};
while true
[dets,numDets,config] = sensor([tgt1 tgt2 tgt3],simTime);
detBuffer = [detBuffer; dets]; %#ok<AGROW>
% Is full scan complete?
if config.IsScanDone
break % yes
end
simTime = simTime + 1/sensor.UpdateRate;
end
radarPosition = [0 0 0];
tgtPositions = [tgt1.Position; tgt2.Position; tgt3.Position];
Визуализация результатов.
clrs = lines(3); figure hold on % Plot radar position plot3(radarPosition(1),radarPosition(2),radarPosition(3),'Marker','s', ... 'DisplayName','Radar','MarkerFaceColor',clrs(1,:),'LineStyle','none') % Plot truth plot3(tgtPositions(:,1),tgtPositions(:,2),tgtPositions(:,3),'Marker','^', ... 'DisplayName','Truth','MarkerFaceColor',clrs(2,:),'LineStyle', 'none') % Plot detections if ~isempty(detBuffer) detPos = cellfun(@(d)d.Measurement(1:3),detBuffer, ... 'UniformOutput',false); detPos = cell2mat(detPos')'; plot3(detPos(:,1),detPos(:,2),detPos(:,3),'Marker','o', ... 'DisplayName','Detections','MarkerFaceColor',clrs(3,:),'LineStyle','none') end xlabel('X(m)') ylabel('Y(m)') axis('equal') legend

fusionRadarSensorСоздайте радиолокационное излучение и затем обнаружите излучение с помощью fusionRadarSensor объект.
Сначала создайте радиолокационное излучение.
orient = quaternion([180 0 0],'eulerd','zyx','frame'); rfSig = radarEmission('PlatformID',1,'EmitterIndex',1,'EIRP',100, ... 'OriginPosition',[30 0 0],'Orientation',orient);
Затем создайте датчик ESM с помощью fusionRadarSensor.
sensor = fusionRadarSensor(1,'DetectionMode','ESM');
Обнаружение радиочастотного излучения.
time = 0; [dets,numDets,config] = sensor(rfSig,time)
dets = 1x1 cell array
{1x1 objectDetection}
numDets = 1
config = struct with fields:
SensorIndex: 1
IsValidTime: 1
IsScanDone: 0
FieldOfView: [1 5]
MeasurementParameters: [1x1 struct]
The fusionRadarSensor Системный объект может смоделировать три режима обнаружения: моностатический, бистатический и электронные меры поддержки (ESM), как показано на следующих рисунках.
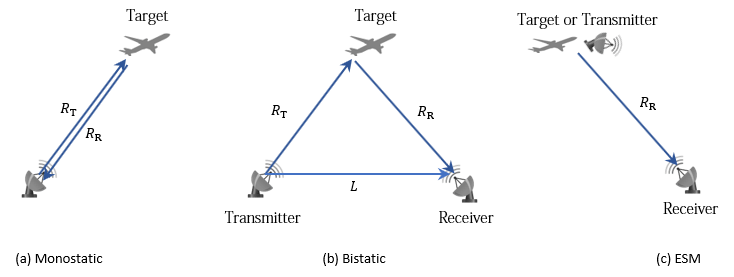
Для моностатического режима обнаружения передатчик и приемник объединяются, как показано на рисунке (а). В этом режиме R измерения области значений могут быть выражены как R = R T = R R, где R T и R R являются расстояниями от передатчика до цели и от цели до приемника, соответственно. В радарном датчике измерение области значений R = c t/2, где c - скорость света, а t - общее время передачи сигнала. Кроме измерения области значений, моностатический датчик может также опционально сообщать об измерениях уровня области значений, азимута и повышения цели.
Для режима бистатического обнаружения передатчик и приемник разделяются дистанционным L. Как показано рисунок (b), сигнал излучается от передатчика, отражается от цели и принимается приемником. Бистатическое измерение <reservedrangesplaceholder10> b области значений определено как <reservedrangesplaceholder9> b = <reservedrangesplaceholder8> T + <reservedrangesplaceholder7> R − <reservedrangesplaceholder6>. В радарном датчике бистатическое измерение области значений получено <reservedrangesplaceholder5> b = <reservedrangesplaceholder4> <reservedrangesplaceholder3> <reservedrangesplaceholder2>, где <reservedrangesplaceholder1> <reservedrangesplaceholder0> - разница во времени между приемником, получающим прямой сигнал от передатчика и получающий отраженный сигнал от цели. Кроме бистатического измерения области значений, бистатический датчик может также опционально сообщать о бистатических измерениях скорости области значений, азимута и повышения цели. Поскольку бистатическая область значений и два угла подшипника (азимут и повышение) не соответствуют одному вектору положения, они не могут быть объединены в вектор положения и сообщены в декартовой системе координат. В результате измерения бистатического датчика могут быть сообщены только в сферической системе координат.
Для режима обнаружения ESM приемник может принимать только сигнал, отраженный от цели или непосредственно излучаемый передатчиком, как показано рисунок (с). Поэтому единственными доступными измерениями являются азимут и повышение цели или передатчика. Эти измерения могут быть сообщены только в сферической системе координат.
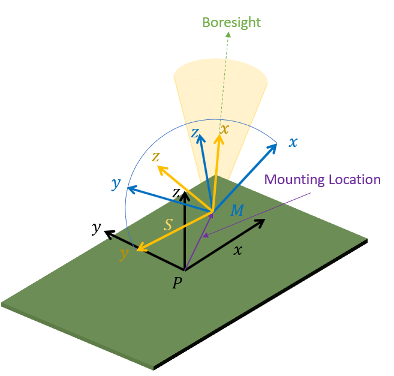
The MeasurementParameters свойство выходного обнаружения состоит из массива структур, который описывает последовательность координатных преобразований из дочерней системы координат в родительскую систему координат или обратных преобразований. В большинстве случаев самой длинной необходимой последовательностью преобразований является сценарий Sensor → Platform →.
Если обнаружения сообщаются в сферических координатах и HasINS датчика установлено в falseтогда последовательность состоит только из одного преобразования от датчика к платформе. В этом преобразовании OriginPosition совпадает с MountingLocation свойство датчика. The Orientation состоит из двух последовательных вращений. Первое вращение, соответствующее MountingAngles свойство датчика, учитывает вращение от системы координат платформы (P) к монтажной системе координат датчика (M). Второе вращение, соответствующее азимуту и углам возвышения датчика, учитывает вращение от монтажной системы координат (M) датчика к сканирующей системе координат (S) датчика. В S системе координат x -направление является направлением boresight, а y -направление лежит в x - y плоскости монтажной системы координат датчика (M).
Если HasINS является true, последовательность преобразований состоит из двух преобразований: сначала из системы координат сценария в систему координат платформы, а затем из системы координат платформы в систему координат сканирования датчика. В первом преобразовании Orientation - поворот от системы координат сценария к системе координат платформы и OriginPosition - положение системы координат платформы относительно системы координат сценария.
Если обнаружения сообщаются в прямоугольных координатах и HasINS платформы установлено в false, преобразование состоит только из тождеств.
В таблице показаны поля MeasurementParameters структура. Не все поля должны присутствовать в структуре. Определенный набор полей и их значения по умолчанию могут зависеть от типа датчика.
| Область | Описание |
Frame | Перечисленный тип, указывающий на систему координат, используемую для сообщения измерений. Когда о обнаружениях сообщают с помощью прямоугольной системы координат, |
OriginPosition | Смещение положения источника дочерней системы координат относительно родительской системы координат, представленное в виде вектора 3 на 1. |
OriginVelocity | Смещение скорости источника дочерней системы координат относительно родительской системы координат, представленное в виде вектора 3 на 1. |
Orientation | Матрица поворота 3 на 3 вещественные ортонормальные системы координат. Направление вращения зависит от |
IsParentToChild | Логический скаляр, указывающий, |
HasElevation | Логический скаляр, указывающий, включено ли в измерение повышение высоты. Для измерений, сообщаемых в прямоугольной системе координат, если |
HasAzimuth | Логический скаляр, указывающий, включен ли азимут в измерение. |
HasRange | Логический скаляр, указывающий, включена ли область значений в измерение. |
HasVelocity | Логический скаляр, указывающий, включают ли сообщенные обнаружения измерения скорости. Для измерений, сообщаемых в прямоугольной системе координат, если |
[1] Doerry, Armin W. «Earth Curvature and Atmospheric Refraction Effects on Radar Signal Propagation». Sandia Report SAND2012-10690, Sandia National Laboratories, Альбукерке, НМ, январь 2013. https://prod.sandia.gov/techlib-noauth/access-control.cgi/2012/1210690.pdf.
[2] Doerry, Armin W. «Motion Measurement for Радар с Синтезированной Апертурой». Sandia Report SAND2015-20818, Sandia National Laboratories, Альбукерке, НМ, январь 2015. https://pdfs.semanticscholar.org/f8f8/cd6de8042a7a948d611bcfe3b79c48aa9dfa.pdf.
radarChannel | radarEmission | radarEmitter | rcsSignature | trackerGNN | trackingScenario
