Функция измерения для модели движения ускорения Сингера
measurements = singermeas(states)measurements в прямоугольных координатах для модели движения Сингера на основе текущей states.
measurements = singermeas(states,frame)frame.
measurements = singermeas(states,frame,sensorpos,sensorvel)sensorpos, и скорость датчика, sensorvel.
measurements = singermeas(states,measurementParameters)measurementParameters.
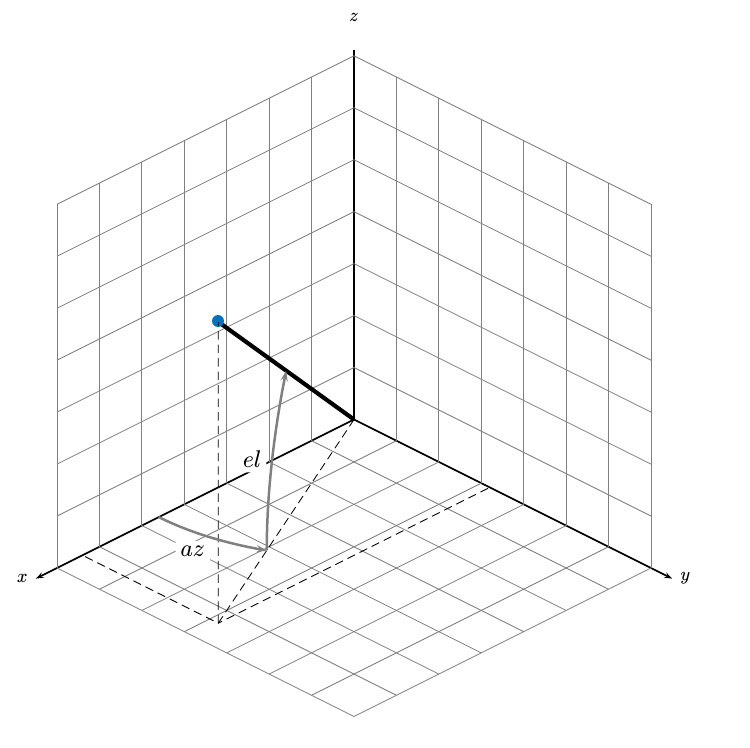
Задайте азимут и углы возвышения, используемые в тулбоксе.
azimuth angle вектора является угол между осью x и ее ортогональной проекцией на плоскость xy. Угол положителен в движении от оси x к оси y. Азимутальные углы лежат между -180 и 180 степенями. elevation angle является углом между вектором и его ортогональной проекцией на xy -плоскость. Угол положителен при движении к положительной оси z от плоскости xy.
[1] Сингер, Роберт А. «Оценка оптимальной эффективности фильтра слежения для пилотируемых маневрирующих целей». Транзакции IEEE по аэрокосмическим и электронным системам 4 (1970): 473-483.
[2] Блэкман, Сэмюэль С. и Роберт Пополи. «Проект и анализ современных систем слежения». (1999).
[3] Li, X. Rong, and Vesselin P. Jilkov. «Обследование маневрирующего сопровождения цели: динамические модели». Обработка сигналов и данных малых мишеней 2000, том 4048, стр. 212-235. Международное общество оптики и фотоники, 2000.
initsingerekf | singer | singerjac | singermeasjac | singerProcessNoise
