Параметрическая кубоидная модель
The cuboidModel объект хранит параметры параметрической кубоидной модели. После создания cuboidModel объект, можно извлечь кубоидные угловые точки и точки внутри кубоида с помощью функций объекта. Кубоидные модели используются для хранения выходных данных pcfitcuboid функция. Это функция подбора кривой формы, которая подходит для кубоида над облаком точек.
model = cuboidModel(params)params.
model = pcfitcuboid(ptCloudIn)pcfitcuboid функция сохраняет свойства кубоида в параметрическом кубоидном объекте модели, model.
model = pcfitcuboid(ptCloudIn,indices)indices, во входном облаке точек.
Для получения дополнительной информации о том, как использовать эту функцию, посетите pcfitcuboid страница с описанием функции.
Parameters - параметры кубоидной моделиЭто свойство доступно только для чтения.
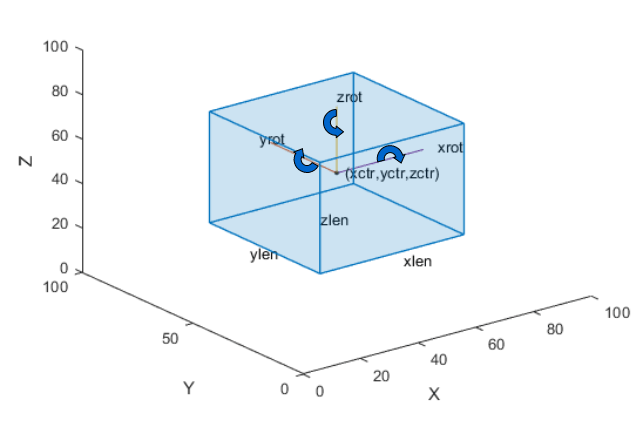
Параметры модели Cuboid, сохраненные как вектор - строка с девятью элементами формы [x центр y центр z гниль центра <reservedrangesplaceholder5> len <reservedrangesplaceholder4> len <reservedrangesplaceholder3> len <reservedrangesplaceholder2> y гниль z гниль].
x ctr, y ctr и z ctr определяют центр кубоида.
x len, y len и z len определяют длину кубоида вдоль оси x -, y - и z - соответственно до применения вращения.
x гниль, y гниль и z гниль определяют углы поворота кубоида вдоль оси x -, y - и z - соответственно. Эти углы являются положительными по часовой стрелке при взгляде в прямом направлении их соответствующих осей.
Рисунок показывает, как эти значения определяют положение кубоида.
Эти параметры заданы params входной параметр.
Типы данных: single | double
Center - Центр кубоидаЭто свойство доступно только для чтения.
Центр кубоида, сохраненный как трехэлементный вектор-строка вида [x ctr y ctr z ctr]. Вектор содержит 3-D координаты кубоидного центра в x -, y - и z - оси, соответственно.
Это свойство определяется из Parameters свойство.
Типы данных: single | double
Dimensions - Размерности кубоидаЭто свойство доступно только для чтения.
Размерности кубоида, сохраненные как трехэлементный вектор-строка вида [x len y len z len]. Вектор содержит длину кубоида вдоль оси x -, y - и z - соответственно.
Это свойство определяется из Paramareters свойство.
Типы данных: single | double
Orientation - Ориентация кубоидаЭто свойство доступно только для чтения.
Ориентация кубоида, сохраненная как трехэлементный вектор-строка вида [x rot y rot z rot], в степенях. Вектор содержит вращение кубоида вдоль оси x -, y - и z - соответственно.
Это свойство определяется из Paramareters свойство.
Типы данных: single | double
getCornerPoints | Получите угловые точки кубоидной модели |
findPointsInsideCuboid | Найти точки, заключенные в кубоидную модель |
plot | Постройте кубоидную модель |
Обнаружение кубоида в облаке точек с помощью pcfitcuboid функция. Функция сохраняет кубоидные параметры как cuboidModel объект.
Считывайте данные облака точек в рабочую область.
ptCloud = pcread('highwayScene.pcd');Поиск облака точек в пределах заданной видимой области (ROI). Создайте облако точек только для обнаруженных точек.
roi = [-30 30 -20 30 -8 13]; in = findPointsInROI(ptCloud,roi); ptCloudIn = select(ptCloud,in);
Постройте график облака точек обнаруженных точек.
figure pcshow(ptCloudIn.Location) xlabel('X(m)') ylabel('Y(m)') zlabel('Z(m)') title('Detected Points in ROI')

Найдите индексы точек в заданном информация только для чтения в облаке точек.
roi = [9.6 13.8 7.9 9.3 -2.5 3]; sampleIndices = findPointsInROI(ptCloudIn,roi);
Подбор кубоида к выбранному набору точек в облаке точек.
model = pcfitcuboid(ptCloudIn,sampleIndices); figure pcshow(ptCloudIn.Location) xlabel('X(m)') ylabel('Y(m)') zlabel('Z(m)') title('Detect a Cuboid in a Point Cloud')
Постройте график кубоидного прямоугольника в облаке точек.
hold on
plot(model)
Отображение внутренних свойств cuboidModel объект.
model
model =
cuboidModel with properties:
Parameters: [11.4873 8.5997 -1.6138 3.6713 1.3220 1.7576 0 0 0.9999]
Center: [11.4873 8.5997 -1.6138]
Dimensions: [3.6713 1.3220 1.7576]
Orientation: [0 0 0.9999]
Подгонка кубоидных ограничивающих рамок вокруг кластеров в облаке точек.
Загрузите данные облака точек в рабочую область.
data = load('drivingLidarPoints.mat');Задайте и обрезайте видимую область (ROI) из облака точек. Визуализируйте выбранный информация только для чтения облака точек.
roi = [-40 40 -6 9 -2 1]; in = findPointsInROI(data.ptCloud,roi); ptCloudIn = select(data.ptCloud,in); hcluster = figure; panel = uipanel('Parent',hcluster,'BackgroundColor',[0 0 0]); ax = axes('Parent',panel,'Color',[0 0 0]); pcshow(ptCloudIn,'MarkerSize',30,'Parent',ax) title('Input Point Cloud')

Сегментируйте плоскость земли. Визуализация сегментированной плоскости земли.
maxDistance = 0.3; referenceVector = [0 0 1]; [~,inliers,outliers] = pcfitplane(ptCloudIn,maxDistance,referenceVector); ptCloudWithoutGround = select(ptCloudIn,outliers,'OutputSize','full'); hSegment = figure; panel = uipanel('Parent',hSegment,'BackgroundColor',[0 0 0]); ax = axes('Parent',panel,'Color',[0 0 0]); pcshowpair(ptCloudIn,ptCloudWithoutGround,'Parent',ax) legend('Ground Region','Non-Ground Region','TextColor', [1 1 1]) title('Segmented Ground Plane')

Сегментируйте неземную область облака точек в кластеры. Визуализация сегментированного облака точек.
distThreshold = 1; [labels,numClusters] = pcsegdist(ptCloudWithoutGround,distThreshold); labelColorIndex = labels; hCuboid = figure; panel = uipanel('Parent',hCuboid,'BackgroundColor',[0 0 0]); ax = axes('Parent',panel,'Color',[0 0 0]); pcshow(ptCloudIn.Location,labelColorIndex,'Parent',ax) title('Fitting Bounding Boxes') hold on
Подбор ограничивающего прямоугольника на каждом кластере, визуализированный как оранжевые подсветки.
for i = 1:numClusters idx = find(labels == i); model = pcfitcuboid(ptCloudWithoutGround,idx); plot(model) end

