Метка достоверных данных в лидар облаков точек
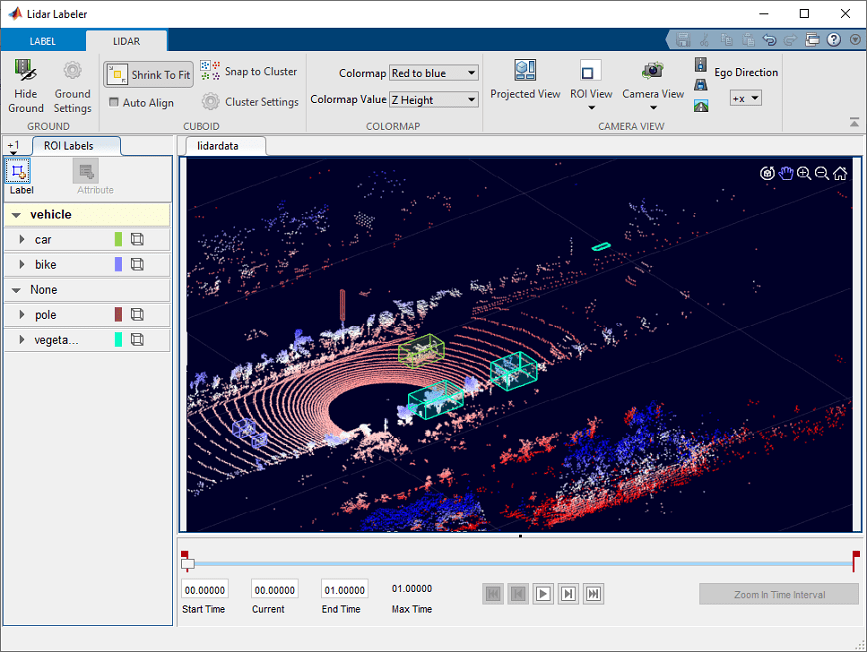
Приложение Lidar Labeler позволяет вам пометить объекты в облаке точек или последовательности облака точек. Приложение считывает данные облака точек из файлов PLY, PCAP, LAS, LAZ, ROS и PCD. Используя приложение, вы можете:
Задайте кубоидные метки видимой области (ROI) и метки сцены. Используйте их, чтобы в интерактивном режиме пометить ваши достоверные данные.
Задайте атрибуты для меток и используйте их для получения дополнительной информации о метках.
Используйте встроенные алгоритмы для кластеризации, сегментации наземной плоскости, автоматической маркировки и отслеживания.
Сохраните определения меток, данные облака точек и достоверные данные в файл сеанса для будущего использования.
Используйте опцию Projected View для одновременного просмотра меток на верхних частях, спереди и сбоку.
Используйте опцию Camera View, чтобы создать и повторно использовать пользовательские представления данных облака точек.
Используйте опцию Auto Align, чтобы повернуть и лучше всего подогнать кубоид к кластеру.
Используйте lidar.syncImageViewer.SyncImageViewer класс, чтобы синхронизировать приложение с внешним инструментом визуализации или анализа.
Запись, импорт и использование пользовательского алгоритма автоматизации для автоматической маркировки.
Оцените эффективность алгоритмов автоматизации меток с помощью визуальных сводных данных.
Экспортируйте помеченную основную истину как groundTruthLidar объект. Этот объект может использоваться для верификации системы и обучения детектора объектов.
Дополнительные сведения об этом приложении см. в разделе Запуске с Lidar Labeler.
MATLAB® Панель инструментов: На вкладке Apps, в разделе Image Processing and Computer Vision, нажмите значок приложения.
Командная строка MATLAB: Ввод lidarLabeler.
Метки не поддерживают подметки.
Окно Сводные Данные не поддерживает подметки.
В левой части приложения панель ROI Labels содержит определения меток информация только для чтения, которые можно пометить в системах координат облака точек. Определения меток можно создать непосредственно на этой панели. Также можно программно создать определения меток с помощью labelDefinitionCreatorLidar Объект и затем импортируйте эти определения меток в сеанс приложения.
Приложение поддерживает определение меток и атрибутов ROI.
ROI label является меткой, которая соответствует информация только для чтения в сигнальной системе координат. Эта таблица описывает поддерживаемый тип метки.
| Информация только для чтения | Описание | Пример |
|---|---|---|
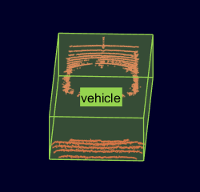
Cuboid | Нарисуйте кубоидальные метки информация только для чтения вокруг объектов. |
|
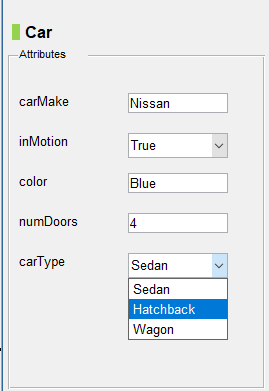
Дополнительная информация о метке информация только для чтения задается в ROI attribute. Для примера в сцене вождения атрибуты могут включать тип или цвет транспортного средства. В этой таблице описываются поддерживаемые типы атрибутов.
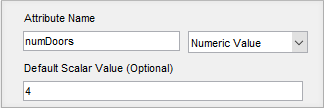
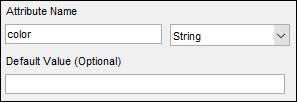
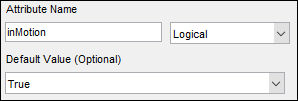
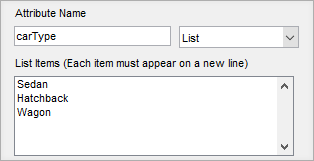
| Тип атрибута | Пример определения атрибута | Пример значений по умолчанию |
|---|---|---|
|
|
|
|
| |
|
| |
|
|
Используйте lidar.syncImageViewer.SyncImageViewer Класс, чтобы создать инструмент для просмотра изображения, соответствующего данным облака точек.
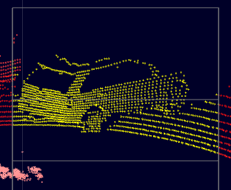
Удалите плоскость заземления, чтобы четко просмотреть созданные метки объектов.
Используйте опции поворота, перемещения, развертывания и усадки, чтобы отредактировать кубоиды после их рисования.
Используйте опцию Camera View, чтобы сохранить вид данных с текущего угла и направления.
Чтобы избежать необходимости повторной маркировки основной истины с помощью новых меток, организуйте схему маркировки, которую вы хотите использовать, прежде чем начинать маркировать основную истину.
Можно копировать и вставлять метки между сигналами одного типа.