Ссылка на растровые камеры для отображения координат
Map камер ссылки содержит объект информацию, которая описывает отношение между планарной системой координат карты и внутренней системой координат, которая привязывается на столбцах и строках 2-D пространственно привязанной растровой сетки или изображения камер.
Обычно растр регулярно отбирается в планарных x мира и мировых координатах y системы карт, так что внутренние x и мировые x оси выравниваются, а внутренние y и мировые y оси выравниваются. Когда это верно, отношение между двумя системами прямолинейно. В более общем плане, и гораздо реже, их отношения аффинны. Аффинная зависимость допускает возможное вращение (и перекос). В любом случае, прямолинейном или аффинном, интервал между образцами из строки в строку не должен равняться интервалу между образцами из столбца в столбец. Камеры или пиксели не должны быть квадратными. В самом общем случае они могли бы быть параллелограммами, но на практике они всегда прямоугольны.
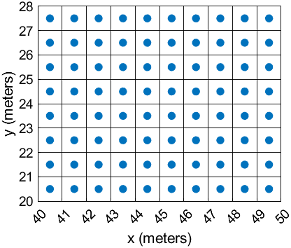
Это изображение иллюстрирует планарный растр камер 8 на 10. Растровые камеры имеют протяженность 1 метр в x и y, покрывают значения x в области значений [40,50] в метрах и покрывают значения y в области значений [20,28] в метрах. Контур растра камер состоит из крайних контуров крайних камер.
Для ссылки растра проводок на плоские координаты карты используйте MapPostingsReference вместо этого объект.
Можно использовать эти функции для создания MapCellsReference объекты:
readgeoraster - Импортируйте файл растровых данных как массив и ссылочный объект.
maprefcells - Создайте объект растровой привязки путем определения x и y пределов мира растра и размера растра или степени камер.
maprasterref - Преобразуйте файл привязки в объект растровой привязки.
refmatToMapRasterReference - Преобразуйте матрицу привязки в объект растровой привязки map.
contains | Определите, содержит ли географический растр или растр карты точки |
firstCornerX | Мир возврата x - координата растрового индекса карты (1,1) |
firstCornerY | Мир возврата y - координата растрового индекса карты (1,1) |
intrinsicToWorld | Преобразуйте внутреннюю единицу в плоские мировые координаты |
sizesMatch | Определите, совместимы ли географический или картографический растровый объект и изображение или растр с размером |
worldFileMatrix | Возвращает параметры файла привязки для преобразования |
worldGrid | Мировые координаты растровых элементов |
worldToDiscrete | Преобразуйте планарный мир в дискретные координаты |
worldToIntrinsic | Преобразуйте планарный мир в внутренние координаты |
Импортируйте классификацию типа поверхности Оаху, Гавайи, как массив, а MapCellsReference объект и палитра при помощи readgeoraster функция.
[Z,R,cmap] = readgeoraster('oahu_landcover.img');Просмотр свойств MapCellsReference объект.
R
R =
MapCellsReference with properties:
XWorldLimits: [569857 645907]
YWorldLimits: [2345284 2405884]
RasterSize: [2020 2535]
RasterInterpretation: 'cells'
ColumnsStartFrom: 'north'
RowsStartFrom: 'west'
CellExtentInWorldX: 30
CellExtentInWorldY: 30
RasterExtentInWorldX: 76050
RasterExtentInWorldY: 60600
XIntrinsicLimits: [0.5 2535.5]
YIntrinsicLimits: [0.5 2020.5]
TransformationType: 'rectilinear'
CoordinateSystemType: 'planar'
ProjectedCRS: [1x1 projcrs]
Отобразите классификацию типа поверхности на карте.
mapshow(Z,cmap,R)

