Motor Control Blockset™ предоставляет инструмент оценки параметра, который точно оценивает параметры двигателя. Используйте предполагаемые параметры двигателя, чтобы симулировать модель электродвигателя и спроектировать систему управления. Поэтому реакция симуляции с оцененными параметрами для модели электродвигателя близка к поведению тестируемого мотора.
Инструмент оценки параметра определяет эти параметры двигателя для синхронного двигателя с постоянными магнитами:
| Параметры двигателя | Модули |
|---|---|
Сопротивление фазы (Rs) | Ом |
d и q составляющих индукции (Ld и Lq) | Генри |
Коэффициент противо-ЭДС, постоянная (Ke) | Vpk_LL/krpm (где Vpk_LL - линейное измерение пикового напряжения) |
Инерция двигателя (J) | Kg.m^2 |
Константа трения (F) | N.m.s |
Инструмент оценки параметра принимает минимальные необходимые входы, запускает тесты на целевом компьютере и отображает предполагаемые параметры.
Инструменту оценки параметра нужно положение двигателя, обнаруженное либо квадратурным энкодером, датчиком Холла, либо наблюдателем потока без датчика. Чтобы правильно обнаружить положение мотора при помощи датчика положения, необходимо калибровать квадратурный энкодер или датчик Холла, прикрепленный к тестируемому двигателю.
Убедитесь, что PMSM находится в условии отсутствия нагрузки.
Если вы используете датчики Холла:
Убедитесь, что PMSM имеет датчики Холла.
Калибровка смещения датчика Холла. Инструкции см. в разделе Калибровка смещения Холла для двигателя PMSM.
Если вы используете квадратурный датчик энкодера:
Убедитесь, что PMSM имеет квадратурный датчик энкодера.
Калибровка смещения квадратурного энкодера. Для получения инструкций смотрите Калибровку смещения квадратурного энкодера для двигателя PMSM.
Примечание
Если вы задаете значение поля Sensor Selection в модели хоста Sensorless, можно пропустить шаг калибровки датчика положения.
Этот пример поддерживает только эти аппаратные строения:
Техасская Instruments™ F28069M контрольная карта строения:
F28069M управляющую карту
DRV8312-69M-KIT инвертор
PMSM с Hall или квадратурным датчиком энкодера
Степень постоянного тока
Примечание
Плата DRV8312-69M-KIT имеет известную проблему в секции степени питания платы. Из-за этого ограничения плата поддерживает не все типы датчиков Холла. Для примера он не поддерживает датчик Холла двигателя Teknic M-2310P.
Техасские инструменты LAUNCHXL-F28379D строения:
LAUNCHXL-F28379D контроллер
BOOSTXL-DRV8305 инвертор
PMSM с Hall или квадратурным датчиком энкодера
Степень постоянного тока
Чтобы запустить оценку параметра, вам нужны следующие продукты:
Motor Control Blockset
Функции с фиксированной точкой Toolbox™
Только чтобы создать целевые модели, вам нужны следующие необязательные продукты:
Embedded Coder®
Пакет поддержки Embedded Coder для техасских инструментов C2000™ процессоров
Для платы управления F28069M строения:
Подключите плату управления F28069M к J1 платы DRV8312-69M-KIT инвертора.
Соедините три фазы двигателя с MOA, MOB и MOC на плате инвертора.
Подключите источник степени постоянного тока к PVDDIN на плате инвертора.
Если вы используете датчик Холла, подключите выход датчика энкодера Холла к J10 на плате инвертора.
Если вы используете датчик квадратурного энкодера, соедините контакты квадратурного энкодера (G, I, A, 5V, B) с J4 на плате инвертора.
Для LAUNCHXL-F28379D строения:
Подключите плату инвертора к плате контроллера таким образом, чтобы J2 J1 BOOSTXL совпали с J1 J2 LAUNCHXL.
Соедините три фазы двигателя с MOTA, MOTB и MOTC на плате инвертора BOOSTXL.
Подключите источник степени постоянного тока к PVDD и GND на плате инвертора BOOSTXL.
Если вы используете датчик Холла, подключите выход датчика Холла к QEP_B (сконфигурированному как eCAP) на LAUNCHXL.
Если вы используете датчик квадратурного энкодера, соедините контакты квадратурного энкодера (G, I, A, 5V, B) с QEP_A на плате контроллера LAUNCHXL.
Для получения дополнительной информации об этих соединениях см. раздел «Аппаратные подключения».
Для получения дополнительной информации о настройках модели смотрите Параметры конфигурации модели.
Для LAUNCHXL-F28379D загрузите пример программы, чтобы CPU2, например, программу, которая управляет CPU2 синим светодиодом с помощью GPIO31 (c28379D_cpu2_blink.slx) чтобы убедиться, что CPU2 не настроена ошибочно использовать периферийные устройства платы, предназначенные для CPU1.
Инструмент оценки параметра включает целевую модель и главную модель. Модели взаимодействуют друг с другом при помощи последовательного интерфейса связи. Для получения дополнительной информации смотрите Host-Target Communication.
Введите сведения о тестируемом двигателе в модель хоста. Целевая модель использует алгоритм, чтобы выполнить тесты на двигателе и оценить параметры двигателя. Модель хоста запускает эти тесты и отображает предполагаемые параметры.
Чтобы открыть модель хоста оценки параметра, введите эту команду:
open_system('mcb_param_est_host_read.slx');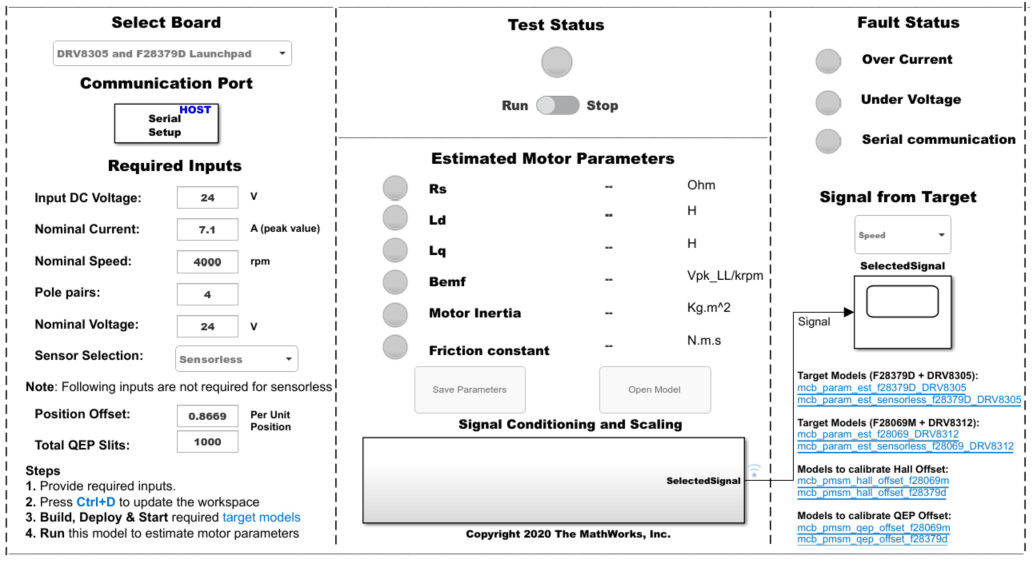
Введите эти детали в модель хоста, чтобы подготовить рабочую область:
Select Board - Выберите целевой компьютер и комбинацию инверторов.
Communication Port - задайте последовательный порт, который необходимо сконфигурировать. Выберите доступный порт из списка. Для получения дополнительной информации смотрите Найти Коммуникационный порт.
Required Inputs - Введите данные спецификаций электродвигателя. Можно получить эти значения либо из таблицы данных электродвигателя, либо из шильдика двигателя.
Input DC Voltage - Напряжение питания постоянного тока для инвертора (В).
Nominal Current - Номинальный ток двигателя (Ampere).
Nominal Speed - Номинальная скорость двигателя (об/мин).
Pole Pairs - Количество пар шестов двигателя.
Nominal Voltage - Номинальное напряжение двигателя (В).
Position Offset - положение (смещение датчика Холла или квадратурного энкодера) (см. Калибровка смещения Холла для двигателя PMSM, калибровка смещения квадратурного энкодера для двигателя PMSM и системы в относительных единицах).
Sensor Selection - Тип датчика положения, который вы используете. Можно выбрать одно из следующих значений:
QEP - Выберите эту опцию, если вы используете датчик квадратурного энкодера, прикрепленный к вашему двигателю.
HALL - Выберите эту опцию, если вы используете датчики Холла, доступные в вашем двигателе.
Sensorless - Выберите эту опцию, если вы хотите использовать Flux Observer блок оценки положения без датчика вместо датчика положения. Для получения дополнительной информации об этом блоке см. Flux Observer.
Total QEP Slits - Количество прорезей, доступных в квадратурном датчике энкодера. По умолчанию это поле имеет значение 1000.
Примечание
При обновлении Required Inputs учитывайте следующие ограничения:
Номинальная скорость двигателя должна быть менее 25000 об/мин.
Тесты защищают оборудование от перегрузок по току. Однако, чтобы убедиться, что эти отказы не происходят, сохраните номинальный ток двигателя (введенный в поле Номинальный ток) меньше, чем максимальный ток, поддерживаемый инвертором.
Если у вас есть блок питания постоянного тока на основе SMPS, установите предел безопасного тока для источника питания по соображениям безопасности.
Прежде чем запускать тесты с помощью инструмента оценки параметра, вы должны загрузить двоичные файлы (.hex/ .out) сгенерирован целевой моделью в целевой компьютер. Существуют два рабочих процессов для загрузки двоичных файлов:
Workflow 1: Build and Deploy Target Model:
Используйте этот рабочий процесс для генерации и развертывания кода для целевой модели. Убедитесь, что вы нажимаете Ctrl+D, чтобы обновить рабочую область с помощью необходимых подробных входов из модели хоста.
Щелкните одну из следующих гиперссылок в модели хоста оценки параметра, чтобы открыть целевую модель (для оборудования, которое вы используете):
Для контроллера F28069M-based подключенного к Hall или квадратурному датчику энкодера:
mcb_param_est_f28069_DRV8312
Для контроллера F28069M-based который использует блок sensorless Flux Observer:
mcb_param_est_sensorless_f28069_DRV8312
Для контроллера F28379D-based подключенного к Hall или квадратурному датчику энкодера:
mcb_param_est_f28379D_DRV8305
Для контроллера F28379D-based который использует блок sensorless Flux Observer:
mcb_param_est_sensorless_f28379D_DRV8305
Щелкните Build, Deploy & Start на вкладке Hardware, чтобы развернуть целевую модель на оборудовании.
Примечание
Игнорируйте предупреждающее сообщение Multitask data store option in the Diagnostics page of the Configuration Parameter Dialog is none отображается консультантом модели, нажатием кнопки Always Ignore. Это часть запланированного рабочего процесса.
Workflow 2: Manually Download Target Model:
Используйте этот рабочий процесс для развертывания двоичных файлов (.hex/ .out) целевой модели вручную с помощью стороннего инструмента (рабочий процесс не нуждается в генерации кода). Этот рабочий процесс действителен только для двигателя Teknic M-2310P.
Найдите двоичные файлы (.hex/ .out) в следующих местах:
<matlabroot>\toolbox\mcb\mcbexamples\mcb_param_est_f28069_DRV8312.out
<matlabroot>\toolbox\mcb\mcbexamples\mcb_param_est_f28379D_DRV8305.out
Откройте стороннюю программу для развертывания двоичных файлов (.hex/ .out).
Загрузите и запустите двоичные файлы (.hex/ .out) на целевом компьютере.
Используйте следующие шаги, чтобы запустить инструмент оценки параметра Motor Control Blockset:
Убедитесь, что вы развертываете двоичные файлы (.hex/ .out) сгенерирован из целевой модели, к целевому компьютеру и обновлен необходимые детали в модели хоста.
В модели хоста нажмите Run на вкладке Simulation, чтобы запустить тесты оценки параметра.
Процесс оценки параметра занимает менее минуты, чтобы выполнить тесты. Вы можете игнорировать звуковой сигнал, издаваемый во время тестов.
Модель хоста отображает предполагаемые параметры двигателя после успешного завершения тестов.
Инструмент использует следующий алгоритм для оценки параметров:
Сопротивление мотора (R) - инструмент использует закон Ома, чтобы оценить это значение.
Индуктивность двигателя (Ld и Lq) - инструмент использует метод частотного впрыска, чтобы оценить эти значения.
Обратный ЭДС (Ke) - инструмент измеряет токи и напряжения и использует уравнение электродвигателя, чтобы оценить это значение.
Поток постоянных магнитов (λ) - инструмент использует оценённый коэффициент противо-ЭДС, постоянная, чтобы оценить это значение.
Константа трения (B) - инструмент оценивает это значение с помощью уравнения крутящего момента для двигателя, вращающегося с постоянной скоростью.
Инерция (J) - инструмент оценивает это значение с помощью теста задержки.
Номинальный крутящий момент - инструмент оценивает это значение с помощью оценочного значения постоянного магнитного потока двигателя.
Когда тесты оценки параметра завершены, Test Status светодиод становится зеленым.
Если тесты прерываются, светодиодный индикатор Test Status становится красным. Когда светодиод станет красным, запустите модель хоста снова, чтобы повторить тесты оценки параметра.
Во время чрезвычайной ситуации можно вручную повернуть переключатель Run-Stop ползунка в Stop положение, чтобы остановить тесты оценки параметра. В сложение модель прерывает тесты оценки параметра и поворачивает эти светодиоды красным цветом, чтобы защитить оборудование от следующих отказов:
Отказ сверхтока (этот отказ возникает, когда фактический ток, потребляемый из источника степени, больше, чем Nominal Current значение, упомянутое в Required Inputs разделе модели хоста)
Отказ под напряжением (этот отказ происходит, когда входное напряжение постоянного тока падает ниже 80% от Input DC Voltage значения, упомянутого в Required Inputs разделе модели хоста)
Отказ последовательной связи
Можно экспортировать предполагаемые параметры двигателя и далее использовать их для разработки системы симуляции и управления.
Для экспорта щелкните Save Parameters, чтобы сохранить предполагаемые параметры в MAT (.mat) файл.
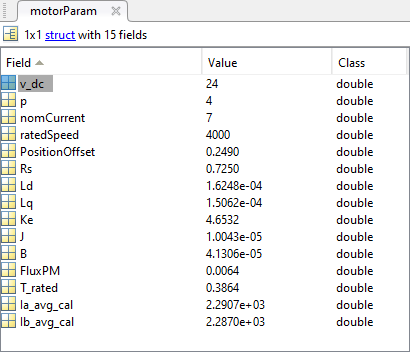
Чтобы просмотреть сохраненные параметры, загрузите MAT (.mat) файл в MATLAB® рабочей области. MATLAB сохраняет параметры в структуре с именем motorParam в рабочей области.
Нажмите Open Model, чтобы создать новый Simulink® модель с блоком двигателя PMSM. Блок мотора использует motorParam структурные переменные из рабочего пространства MATLAB.
