Модельный прогнозирующий контроллер требует следующего для эффективного отклонения неизвестных нарушений порядка:
Прикладные модели возмущения
Обратная связь измерения для обновления оценок состояния контроллера
Можно изменять входные и выходные модели возмущения, и модель шума измерения с помощью приложения MPC Designer и в командной строке. Затем можно настроить веса настройки контроллера, чтобы улучшить подавление помех.
MPC пытается предсказать, как известные и неизвестные события влияют на выходные переменные (OV) объекта. Известными событиями являются изменения в измеренных входных переменных объекта управления (MV и MD входы). Модель объекта управления контроллера предсказывает влияние этих событий, и такие предсказания могут быть довольно точными. Для получения дополнительной информации см. «Моделирование MPC».
Влияния неизвестных событий появляются как ошибки в предсказаниях известных событий. Эти ошибки по определению невозможно точно предсказать. Однако способность предвидеть тренды может улучшить подавление помех. Например, предположим, что система управления работала в почти устойчивом условии со всеми измеренными OV, близкими к их предсказанным значениям. Нет известных событий, но один или несколько из этих OV внезапно отклоняются от своего предсказания. Модели нарушения порядка и измерения шума контроллера позволяют предоставить руководство о том, как справиться с такими ошибками.
Предположим, что ваша модель объекта управления не содержит никаких неизмеренных входов нарушения порядка. Затем контроллер MPC моделирует неизвестные события с помощью выходной модели возмущения. Как показано на Моделировании MPC, выходная модель возмущения не зависит от объекта, и ее выход добавляет непосредственно к модели модели объекта управления.
Используя MPC Designer, можно задать тип шума, который, как ожидается, повлияет на каждое OV объекта. В приложении, на вкладке Tuning, в разделе Design, нажмите Estimation Models > Output Disturbance Model. В диалоговом окне Output Disturbance Model, в раскрывающемся списке Update the model, выберите specifying a custom model channel by channel.
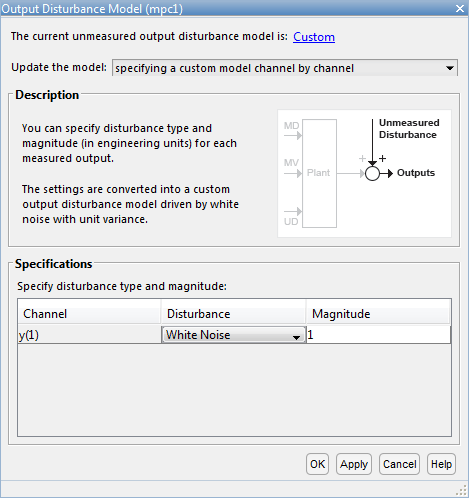
В Specifications разделе в столбце Disturbance выберите одну из следующих моделей возмущения для каждого выхода:
White Noise - Ошибки предсказания вызваны случайным нулевым шумом белого цвета. Эта опция подразумевает, что влияние нарушения порядка является кратковременным, и поэтому требует скромной, краткосрочной реакции контроллера.
Random Step-like - Ошибки предсказания вызваны случайным ступенчатым нарушением порядка, которое длится бесконечно, сохраняя примерно постоянную величину. Такое нарушение порядка требует более агрессивной, устойчивой реакции контроллера.
Random Ramp-like - Ошибки предсказания вызваны случайным нарушением порядка, подобным наклону, которое длится бесконечно и имеет тенденцию расти со временем. Такое нарушение порядка требует еще более агрессивной реакции контроллера.
Программное обеспечение Model Predictive Control Toolbox™ представляет каждый тип нарушения порядка как модель, в которой белый шум с нулевым средним и единичным отклонением входит в динамическую систему SISO, состоящую из одного из следующего:
Статическое усиление - для белого шума нарушения порядка
Интегратор последовательно со статическим усилением - Для шагового нарушения порядка
Два интегратора последовательно со статическим усилением - Для клиновидного нарушения порядка
Можно также задать входную Magnitude белого шума для каждой модели возмущения, переопределяя предположение модуля измерения. Когда вы увеличиваете величину, контроллер более агрессивно реагирует на заданную ошибку предсказания. Заданная величина соответствует статическому усилению в модели SISO для каждого типа шума.
Можно также просмотреть или изменить выходную модель возмущения из командной строки, используя getoutdist и setoutdist соответственно.
MPC также пытается отличить нарушения порядка, которые требуют ответа контроллера, от шума измерения, который контроллер должен игнорировать. Используя MPC Designer, можно задать ожидаемые величины и символ измерения. В приложении, на вкладке Tuning, в разделе Design, нажмите Estimation Models > Measurement Noise Model. В диалоговом окне Model Noise Model, в раскрывающемся списке Update the model, выберите specifying a custom model channel by channel.
В разделе Specifications в столбце Disturbance выберите модель шума для каждого измеренного выходного канала. Опции шума те же, что и опции модели возмущения на выходе.
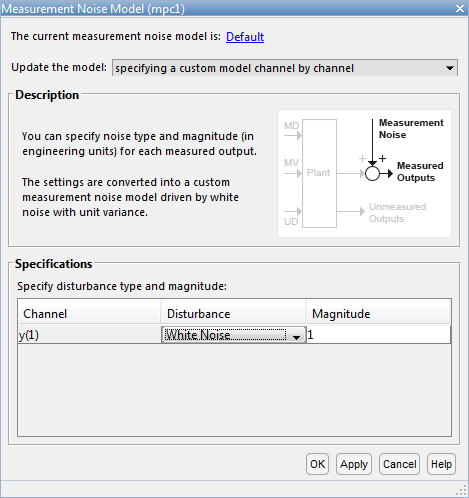
White Noise является опцией по умолчанию и почти во всех приложениях должна обеспечивать адекватную эффективность.
Когда вы включаете модель шума измерения, контроллер рассматривает каждую ошибку предсказания как комбинацию нарушений порядка и шума. Качественно, когда вы увеличиваете заданные Magnitude шума, контроллер приписывает большую часть каждой ошибки предсказания шуму, и он реагирует менее агрессивно. В конечном счете, контроллер перестает реагировать на ошибки предсказания и только изменяет свои MV, когда вы изменяете опорные сигналы OV или MV.
Когда ваша модель объекта управления включает неизмеренные входы нарушения порядка (UD), контроллер может использовать input disturbance model в дополнение к стандартной модели возмущения выхода. Первый обеспечивает большую гибкость и автоматически генерируется по умолчанию. Если выбранная модель входного возмущения не позволяет полностью исключить устойчивые нарушения порядка, модель выходного возмущения также добавляется по умолчанию.
Как показано на MPC Modeling, вход возмущения состоит из одного или нескольких сигналов белого шума с единичным отклонением и нулевым средним, входящих в динамическую систему. Выходы этой системы являются входами для модели объекта управления. В отличие от модели возмущения выхода, входные нарушения порядка влияют на выходы объекта более комплексным образом, когда они проходят через динамику модели объекта управления.
Как и в случае с выходной моделью возмущения, можно использовать MPC Designer, чтобы задать тип нарушения порядка, которого вы ожидаете для каждого входа UD. В приложении, на вкладке Tuning, в разделе Design, нажмите Estimation Models > Input Disturbance Model. В диалоговом окне Input Disturbance Model, в раскрывающемся списке Update the model, выберите specifying a custom model channel by channel.
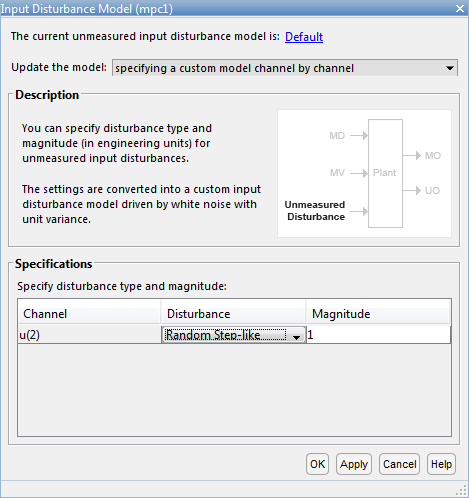
В разделе Specifications в столбце Disturbance выберите модель шума для каждого измеренного выходного канала. Опции модели входного возмущения совпадают с опциями модели выходного возмущения.
Общим подходом является моделирование неизвестных событий как нарушений порядка, добавляющих к MV объекта. Эти нарушения порядка, называемые load disturbances во многих текстах, реалистичны тем, что некоторые неизвестные события являются отказами в установке MV на значения, запрошенные контроллером. Можно создать модель возмущения нагрузки следующим образом:
Начнем с модели объекта управления LTI, Plant, в котором все входы известны (MV и MD).
Получите матрицы пространства состояний Plant. Для примера:
[A,B,C,D] = ssdata(Plant);
Предположим, что существует nu MV. Установите Bu = столбцы B, соответствующих MV. Кроме того, установите Du = столбцы D, соответствующих MV.
Переопределите модель объекта управления, чтобы включить nu дополнительные входы. Для примера:
Plant.B = [B Bu]; Plant.D = [D Du]);
Чтобы указать, что новые входы являются неизмеренными нарушениями порядка, используйте setmpcsignals, или установите Plant.InputGroup свойство.
Эта процедура добавляет входы нарушения порядка нагрузки, не увеличивая количество состояний в модели объекта управления.
По умолчанию, учитывая модель объекта управления, содержащую нарушения порядка нагрузки, программное обеспечение Model Predictive Control Toolbox создает модель входа возмущения, которая генерирует nym ступенчатые нарушения порядка нагрузки. Если nym > nu, это также создает выходную модель возмущения с интегрированным белым шумом, добавляющим к (nym - nu) измеренным выходам. Если nym < nu, последние (nu - nym) нарушения порядка нагрузки по умолчанию равны нулю. Можно изменить эти значения по умолчанию с помощью MPC Designer.
Можно также просмотреть или изменить входную модель возмущения из командной строки, используя getindist и setindist соответственно.
Как обсуждалось в оценке состояния контроллера, модель объекта управления, нарушения порядка и шума объединяются, чтобы сформировать наблюдатель состояния, который должен быть обнаруживаемым с помощью измеренных выходов объекта управления. Если нет, программа отображает сообщение об ошибке командного окна при попытке использовать контроллер.
Это ограничение ограничивает форму моделей нарушения порядка и шума. Если какие-либо модели определены как что-либо, кроме белого шума со статическим усилением, их состояния модели должны быть обнаруживаемыми. Для примера интегрированный белый шум нарушения порядка добавления к неизмеренному OV был бы неопределяемым. MPC Designer препятствует выбору такой модели. Точно так же количество измеренных нарушений порядка, nym, ограничивает количество ступенчатых входов UD от входной модели возмущения.
По умолчанию программное обеспечение Model Predictive Control Toolbox создает обнаруживаемые модели. Если вы измените допущения по умолчанию (или измените nym) и столкнетесь с ошибкой обнаруживаемости, можно вернуться к случаю по умолчанию.
В процессе проекта можно настроить свойства подавления помех контроллера.
Перед любой настройкой контроллера задайте масштабные коэффициенты для каждой входной и выходной переменной объекта управления (см. «Задание масштабных коэффициентов»). В контексте нарушения порядка и шума это делает предположение по умолчанию для входных параметров белого шума с дисперсией единиц с большей вероятностью даст хорошую эффективность.
Первоначально сохраните модели возмущения в их строение по умолчанию.
После настройки весов функции стоимости (см. «Настройка весов»), протестируйте ответ контроллера на неизмеренный вход нарушения порядка, отличный от шагового нарушения порядка на выходе объекта. В частности, если ваша модель объекта управления включает входы UD, моделируйте нарушение порядка, используя один или несколько из них. В противном случае моделируйте одно или несколько нарушения порядка нагрузки, то есть нарушение порядка шага, добавленное к назначенному MV. И MPC Designer, и sim команда поддерживает такие симуляции.
Если реакция в симуляциях слишком медленная, попробуйте одно или несколько из следующих, чтобы получить более агрессивное подавление помех:
Увеличьте все усиления модели возмущения мультипликативным фактором. В MPC Designer, сделайте это, увеличив величину каждого нарушения порядка. Если это помогает, но недостаточно, увеличьте величину дополнительно.
Уменьшите коэффициент усиления шума измерения на мультипликативный коэффициент. В MPC Designer, сделайте это, увеличив величину шума измерения. Если это помогает, но недостаточно, увеличьте величину дополнительно.
В MPC Designer на вкладке Tuning перетащите State Estimation ползунок вправо. Движение к оценке Faster состояния одновременно увеличивает усиления для моделей возмущения и уменьшает усиления для моделей шума.
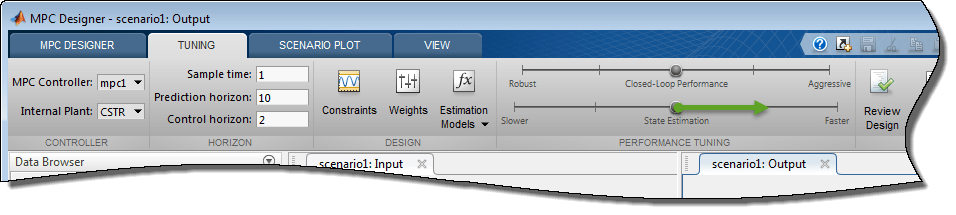
Если этого недостаточно, перетащите ползунок вправо.
Измените одно или несколько нарушения порядка на модель, которая требует более агрессивной реакции контроллера. Для примера смените модель с белого шума нарушения порядка на ступенчатое нарушение порядка.
Примечание
Изменение нарушений порядка таким образом добавляет состояния в модель возмущения, что может вызвать нарушения ограничения обнаруживаемости наблюдателя состояния.
Если реакция является слишком агрессивной, и, в частности, если контроллер не является устойчивым, когда его предсказание известных событий неточно, попробуйте отменить предыдущие корректировки.
