Как и реальные шкивы, Simscape™ Driveline™ Belt Pulley блок полагается на натяжение ремня и инерцию для движения. Чтобы предотвратить ошибки инициализации и получить необходимую передачу степени от вашей системы шкивов, используйте эти методы моделирования.
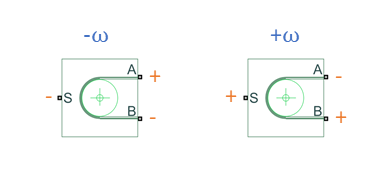
Направление ремня является соглашением о знаке шкива, которое не ограничено физикой или геометрией. Для блока Belt Pulley с Belt direction значением Ends move in opposite directionскорости в портах A и B портов будут иметь противоположные знаки, которые зависят от знака скорости вращения, ω.
Для блока Belt Pulley с Belt direction значением Ends move in same directionскорости в портах A и B портов будут иметь те же знаки, которые зависят от знака скорости вращения.
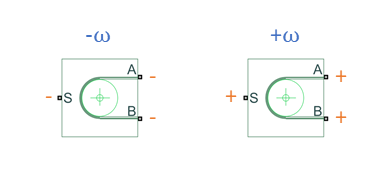
The Ends move in same direction опция применима к большинству систем шкивов. The Ends move in same direction опция позволяет смоделировать упрощенное представление сложной блочно-тактовой системы с концами ремней, которые движутся в том же направлении.
Для облегчения движения включите инерцию в систему шкивов. Инерцию можно включить в блок шкива, задав ненулевое значение для параметра Inertia в настройках строения блока. Другой способ включения инерции - добавить нисходящий блок инерции из библиотеки Simscape Driveline Inertias and Loads или из библиотеки Rotational Elements. Атрибут некоторой начальной скорости инерции, при необходимости, чтобы инициировать движение в вашей системе шкивов.
Можно также добавить массу к устройству натяжения, чтобы помочь с численной инициализацией. Если вы используете блок Rope в качестве натяжного устройства, установите Model mass равным On.
Поддерживайте контакт ремня путем включения Rope блоков в систему шкивов. Включите на один Rope блоки меньше, чем количество пар шкивов, как минимум. Для примера, если существует пять пар шкивов, включают по меньшей мере четыре блока Rope. Использование может подтвердить, что ремни начинаются и остаются в натянутом состоянии при помощи Simscape Results Explorer. Противоположное подключение к порту может решить эту проблему.
Для получения дополнительной информации смотрите пример системы степени питания ниже.
Пример Simscape Driveline Power Window System содержит шкивную сеть, которая использует натяжение и инерцию и соблюдает рекомендуемые методы направления ремня.
Чтобы открыть модель, в MATLAB® в командной строке введите
sdl_power_window
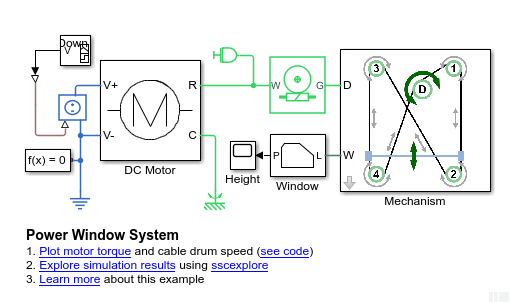
Модель содержит подсистему Mechanism, подсистему маскированной шкивной сети. Подсистема двигателя постоянного тока и блок Worm Gear работают вместе, чтобы инициировать движение в системе шкивов. Система также содержит блок Inertia.
Чтобы заглянуть внутрь маски подсистемы Mechanism, щелкните стреле в левом нижнем углу блока.
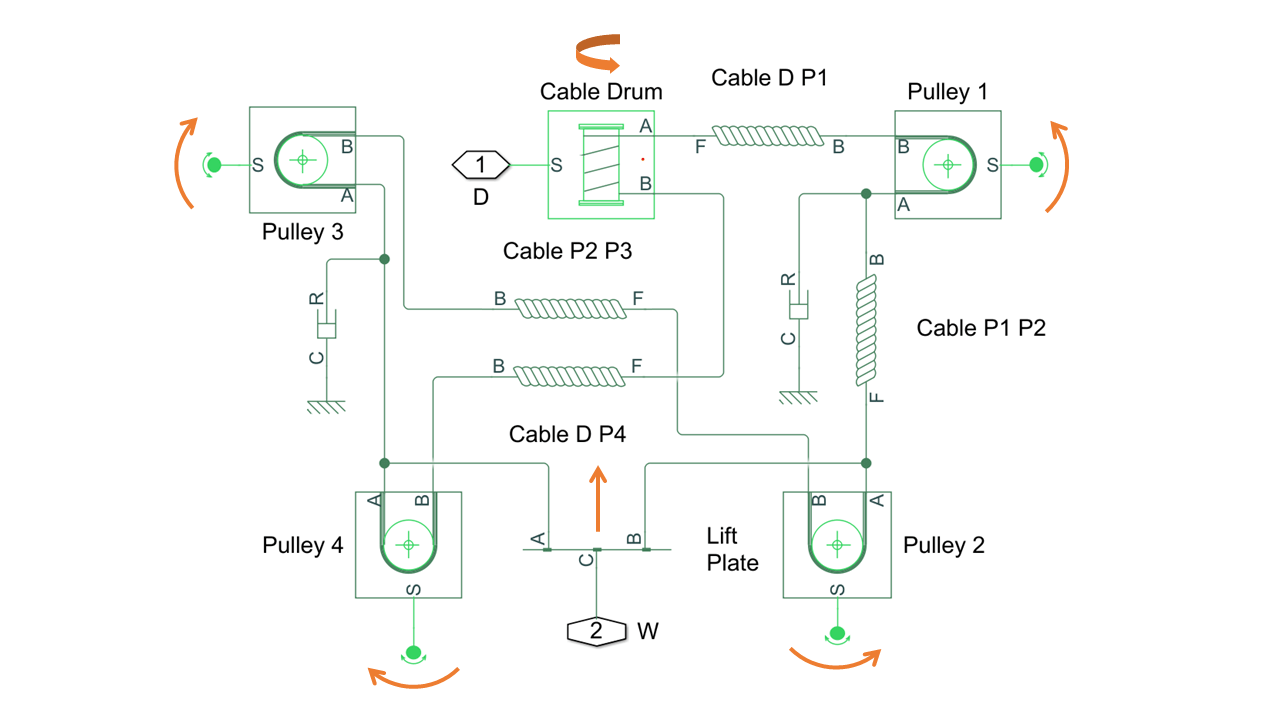
Стрелы показывают, как четыре блока Belt Pulley вращаются в ответ на поворот блока Cable Drum. Если барабан вращается в противоположном направлении, направление шкива возвращается назад, а Lift Plate опускается. Существует шесть пар шкивов:
Cable Drum и Pulley 1
Pulley 1 и Pulley 2
Pulley 2 и Pulley 3
Pulley 3 и Pulley 4
Pulley 4 и Cable Drum
Pulley 2 и Pulley 4
Вам нужно как минимум пять блоков Rope, чтобы создать эту систему. Lift Plate действует как натяжитель для пары Pulley 2 и Pulley 4 шкивов. Система содержит четыре дополнительных блока Rope. На рисунке можно увидеть, как эти блоки реализованы в системе.
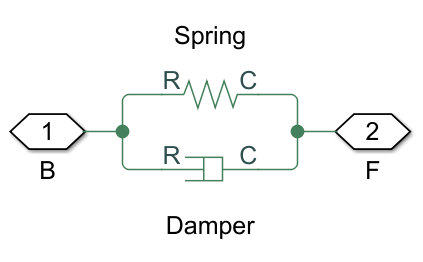
Каждый блок Rope содержит сеть пружины и демпфера, отделяющую порт основания от последующего порта.
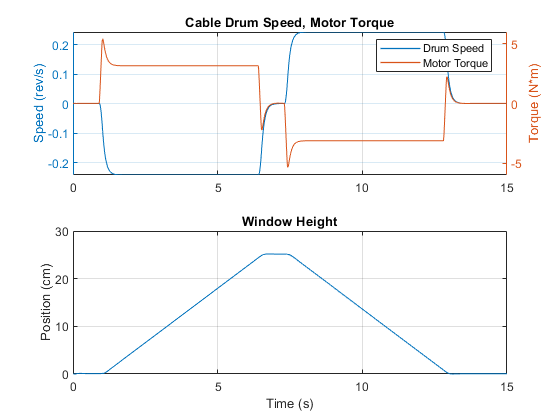
Запустите симуляцию и постройте график результатов нажав на Plot motor torque ссылку в холсте модели. Когда Cable Drum имеет отрицательную скорость вращения, Lift Plate поднимает окно. Когда Cable Drum имеет положительную скорость, Lift Plate опускает окно.
Откройте проводник результатов, щелкнув ссылку Explore simulation results в холсте модели. На панели инструментов Results Explorer нажмите кнопку настроек![]() и, для параметра Plot signals, выберите
и, для параметра Plot signals, выберите Separate. Используйте Ctrl + click, чтобы открыть графики для:
Mechanism> Cable Drum> A> v
Pulley 1> A> v
Pulley 1> B> v
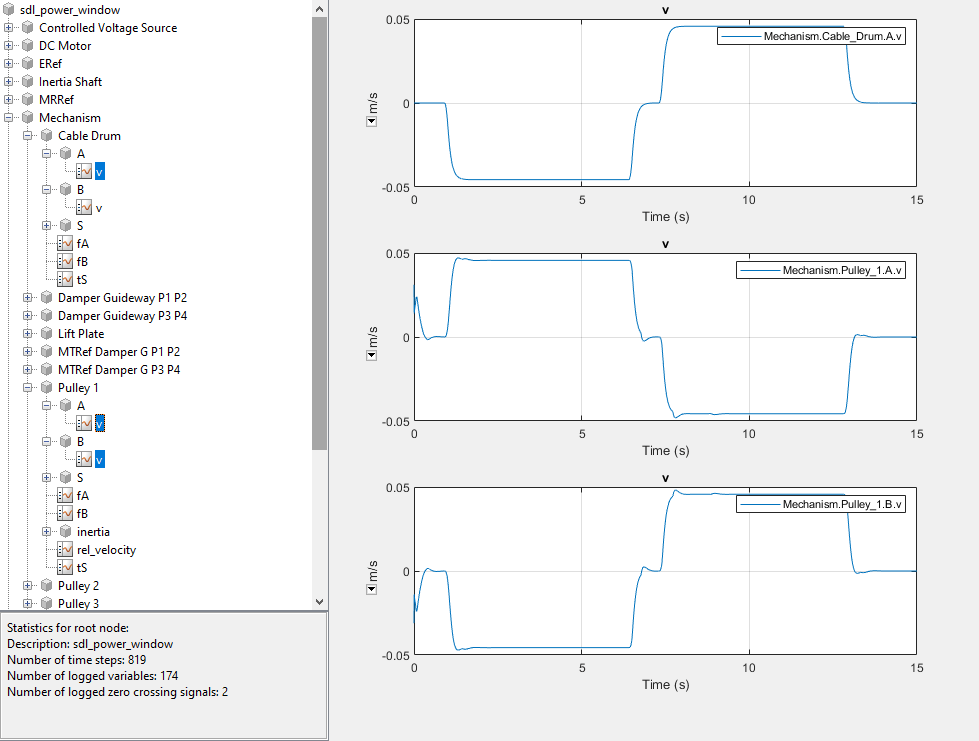
Как ожидалось, скорость конца барабанной ленты в порте A совпадает со скоростью конца Pulley 1 ленты в порту B и противоположна скорости конца Pulley 1 ленты в порту A.
Belt Drive | Belt Pulley | Inertia | Mechanical Translational Reference | Rope | Rope Drum | Rotational Free End | Shock Absorber | Translational Damper | Variable Inertia | Worm Gear
