Фрикционная муфта с коническими пластинами, которые зацепляются, когда нормальная сила превышает порог
Simscape/Driveline/Сцепления
Блок Cone Clutch представляет собой фрикционную муфту с коническим контактным интерфейсом. Коническая граница уменьшает нормальную силу, необходимую для зацепления муфты, создавая заклинивающее действие между компонентами муфты, конусом и чашкой. Применение конусной муфты включает в себя синхромеханические коробки передач, которые синхронизируют скорость привода и ведомого вала, чтобы обеспечить более плавное зацепление между трансмиссиями.
Компонент жестко соединяется с валом, вращаясь вместе с ним как с модулем. Конусный компонент жестко соединяется с ведомым валом, который находится в осевом выравнивании с ведущим валом. Муфта зацепляется, когда конус скользит к стакану и плотно прижимается к его внутренней поверхности. Трение на контактном интерфейсе конусного стакана позволяет муфте передавать степень между ведущим и ведомым валами. Модель трения этого блока включает как статические, так и кинетические вклады трения, последний из которых приводит к рассеиванию степени во время скольжения между конусом и компонентами.
Блок Cone Clutch основан на блоке Fundamental Friction Clutch. Полную модель фрикционной муфты см. в Fundamental Friction Clutch. В этом разделе рассматривается специализированная модель, реализованная в блоке Cone Clutch.
Когда вы прикладываете нормальную силу, FN, Cone Clutch блок может применить два вида трения, кинетические и статические, к движению привода. Муфта применяет кинетический крутящий момент трения только, когда одна ось привода вращается относительно другой оси привода. Муфта применяет статический крутящий момент трения, когда две оси привода фиксируются и вращаются вместе. Блок итерации через многоступенчатую проверку, чтобы определить, когда блокировать и разблокировать муфту.
Можно также включить отказ. Когда происходит отказ, муфта остается заблокированной или не сможет передать степень. Отказы могут возникнуть в указанное время или из-за внешнего триггера на порте T.
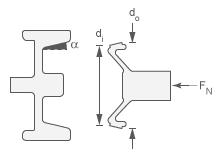
Рисунок показывает геометрию муфты конуса.
Переменные муфты
| Параметр | Определение | Значение |
|---|---|---|
| d o | Внешний диаметр конической контактной поверхности | См. предыдущий рисунок |
| d i | Внутренний диаметр конической контактной поверхности | См. предыдущий рисунок |
| α | Половина конуса угла | См. предыдущий рисунок |
| ω | Относительная скорость вращения (скольжение) | ω F - ω B |
| ω Тол | Допуск скольжения для фиксации муфты | Смотрите следующую модель |
| F N | Нормальная сила, приложенная к коническим поверхностям | Приложенная нормальная сила, если больше порога: F N > F th |
| α | Конусные полууглы | См. предыдущий рисунок |
| r eff | Эффективный радиус крутящего момента | Рычаг эффективного момента силы трения муфты |
| k K | Коэффициент кинетического трения | Безразмерный коэффициент кинетического трения конических поверхностей трения. Функция ω. |
| k S | Статический коэффициент трения | Безразмерный коэффициент статического трения конических поверхностей трения. |
| τ K | Кинетический крутящий момент трения | Смотрите следующую модель |
| τ S | Предел крутящего момента трения | (статический коэффициент трения)· (кинетический крутящий момент трения для ω → 0) (См. Следующую модель) |
Блок Cone Clutch основан на блоке Fundamental Friction Clutch. Вместо того, чтобы требовать крутящие моменты предела кинетического и статического трения в качестве входных сигналов, блок Cone Clutch вычисляет кинетическое и статическое трение из параметров муфты и входа FN сигнала нормальной силы.
Кинетический крутящий момент трения является продуктом четырех факторов:
Кинетический крутящий момент трения противоположен относительному скольжению и прикладывается с общим знаком минус. Он изменяет знак, когда ω изменяет знак.
Вы задаете кинетический коэффициент трения, kK, как константу или табличную дискретную функцию относительной скорости вращения, ω. Сведенная в таблицу функция принята симметричной для положительных и отрицательных значений относительной скорости вращения. Поэтому задайте k K только для положительных значений ω.
Эффективный радиус крутящего момента, reff, является эффективным радиусом, измеренным от оси привода, при котором кинетические силы трения прикладываются к фрикционным поверхностям. Оно связано с геометрией геометрии конической поверхности трения следующим образом:
do и di являются максимальным и минимальным диаметрами контактной поверхности, соответственно.
Статический предел трения связан с кинетическим трением, установлением ω на нуль и заменой кинетического коэффициентом трения:
k S > k K, так что крутящий момент, τ, нужен через муфту, чтобы разблокировать ее, преодолевая статическое трение, больше, чем кинетическое трение в момент разблокировки, когда ω = 0.
Статический предел трения определяет симметричные пределы статического момента трения как:
Диапазон [τ S–, τ S+] используется фрикционной муфтой.
Муфта входит в зацепление (передает крутящий момент), когда конические поверхности трения подвержены положительной нормальной силе, и генерирует кинетическое трение: F N > 0 и τK > 0.
Муфта блокируется тогда и только тогда, когда она включена, и скольжение меньше, чем допуск скорости: |<reservedrangesplaceholder1>| < ω Tol.
Рассеянное муфтой степень |<reservedrangesplaceholder2>·<reservedrangesplaceholder1>|. Муфта рассеивает степень только в том случае, если она скользит (в ≠ 0) и применяет кинетическое трение (τK > 0).
Можно смоделировать эффекты изменения скорости вращения, выбрав зависящую от скорости модель. Чтобы выбрать модель, зависящую от скорости, в настройках Friction установите параметр Friction model равным Velocity-dependent kinetic friction coefficient. Для получения информации о модели трения, которая зависит как от скорости, так и от температуры, смотрите Тепловую, Скоростезависимую Модель.
Для модели, зависящей от скорости, эти связанные параметры становятся видимыми в Friction настройках:
Relative velocity vector
Kinetic friction coefficient vector
Friction coefficient interpolation method
Friction coefficient extrapolation method
Можно смоделировать эффекты теплового потока и изменения температуры, выбрав зависящую от температуры модель. Чтобы выбрать температурно-зависимую модель, в настройках Friction установите параметр Friction model равным Temperature-dependent friction coefficients. Для получения информации о модели трения, которая зависит как от скорости, так и от температуры, смотрите Тепловую, Скоростезависимую Модель.
Для зависящей от температуры модели видны тепловые H портов и эти настройки:
В настройках Friction:
Temperature vector
Static friction coefficient vector
Kinetic friction coefficient vector
Friction coefficient interpolation method
Friction coefficient extrapolation method
В настройках Thermal Port:
Thermal mass
Initial Temperature
Можно смоделировать эффекты изменения скорости вращения и теплового потока, выбрав зависимую от скорости и зависящую от температуры модель. Чтобы выбрать модель, которая зависит и от скорости, и от температуры, в настройках Friction установите параметр Friction model равным Temperature and velocity-dependent friction coefficients.
Для модели, зависящей от скорости и температуры, тепловой порт H и эти соответствующие настройки и параметры становятся видимыми:
В настройках Friction:
Relative velocity vector
Temperature vector
Static friction coefficient vector
Kinetic friction coefficient matrix
Friction coefficient interpolation method
Friction coefficient extrapolation method
В настройках Thermal Port:
Thermal mass
Initial Temperature
Вы можете включить дефектное поведение в ответ на:
Время симуляции - Нарушение происходит в указанное время.
Симуляция поведения - Нарушение происходит в ответ на внешний триггер. Это открывает T порта.
Можно выбрать одну или обе из этих настроек для отказа блоков. Если срабатывает отказ, муфта реагирует в соответствии с настройкой Behavior when faulted для оставшейся части симуляции. Опции отказа:
Cannot transmit power
Cannot unlock
Можно задать блок, чтобы выдать отчет о неисправности как предупреждение или сообщение об ошибке в Simulink Diagnostic Viewer с параметром Reporting when fault occurs.
Dog Clutch | Double-Sided Synchronizer | Fundamental Friction Clutch | Logic-Controlled Clutch | Synchronizer | Unidirectional Clutch
