Пары муфт «назад-назад собака-конус» собраны симметрично вокруг поступательного упора для обеспечения плавного зацепления шестерни
Simscape/Driveline/Сцепления
Блок представляет собой двусторонний синхронизатор, который содержит две обратные собачьи муфты, две обратные конусные муфты и один поступательный фиксатор. Редактирование сдвига вдоль отрицательного направления заставляет муфты зацеплять звонок со ступицей A. Редактирование сдвига вдоль положительного направления заставляет муфты зацеплять звонок со ступицей B. Когда амплитуда сдвига редактирования перемещения меньше, чем зазор кольцо-ступица конусной муфты, синхронизатор находится в нейтральном режиме и не передает крутящий момент.
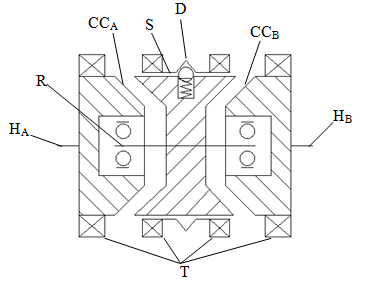
Схема иллюстрирует двусторонний синхронизатор в отключенном состоянии. В этом состоянии звонок, R и ступица, HA и HB, валы могут вращаться независимо на разных скоростях. Когда переключающее редактирование, S, перемещается в отрицательном направлении, грани A (CCA) сцепления конуса вступают в контакт. Трение в муфте конуса уменьшает различие в скорости вращения между валами. Когда сила на сдвиг редактирования превышает пиковую силу фиксатора, D, зубы сцепления собаки, T, могут зацепляться. Пиковая сила фиксации должна быть такой, чтобы муфта конуса имела достаточно времени и нормальной силы, чтобы привести валы к достаточно сходным скоростям, чтобы обеспечить зацепление муфты захвата. Точно так же перемещение переключающего звена вдоль положительного направления позволяет граням B (CCB) сцепления конуса войти в контакт и может позволить валу кольца зацепляться с валом ступицы B (HB).
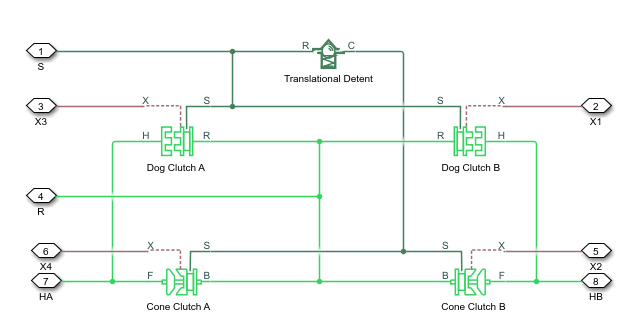
Модель реализует два блока Dog Clutch, два блока Cone Clutch и один блок Translational Detent. Для получения дополнительной информации о соответствующей функции блока обратитесь к каждой странице с описанием блоков.
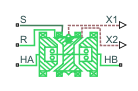
Связи R, HA и HB являются портами механического вращений, которые представляют звонок, R, A ступицы (HA) и B ступицы (HB), соответственно. Связь S является портом механической передачи, которая представляет указателю переключателя звонка .
Связи X1 и X2 являются портами физического сигнала, которые выводят сдвига редактирования положения муфт собаки и муфт конуса, соответственно. Таблицы содержат значения X1 и X2 в общих корпусах сцепления.
| Состояние сцепления с собакой | X1 |
|---|---|
| Разъединенный | 0 |
| Полностью зацеплен с концентратором A | Отрицательная сумма зазора кольцо-ступица и высоты зуба |
| Полностью зацеплен с концентратором B | Положительная сумма зазора кольцо-ступица и высота зуба |
| Состояние муфты конуса | X2 |
|---|---|
| Разъединенный | 0 |
| Полностью зацеплен с концентратором A | Отрицательное значение зазора в кольцевой ступице |
| Полностью зацеплен с концентратором B | Положительное значение зазора в кольцевой ступице |
Значения X1 и X2 равны нулю, когда синхронизатор полностью отключен. Когда муфта собаки полностью зацеплена со ступицей A, X1 равно отрицательной сумме ее зазора кольцо-ступица и высоты зуба. Когда собачья муфта полностью зацеплена со ступицей B, X1 равно положительной сумме ее зазора кольцо-ступица и высоты зуба. Когда муфта конуса полностью зацеплена со ступицей A, X2 равно отрицательному значению зазора ее кольцевой ступицы. Когда муфта конуса полностью зацеплена со ступицей B, X2 равно ее зазору кольцо-ступица.
Можно смоделировать эффекты теплового потока и изменения температуры через опционный тепловой порт. По умолчанию тепловой порт скрыт. Чтобы открыть тепловой порт, в настройках Clutch выберите зависящий от температуры параметр setting tor the Friction model. Задайте соответствующие тепловые параметры для компонента.
Модель не учитывает эффекты инерции. Можно добавить блок Simscape™ Inertia в каждый порт, чтобы добавить инерцию в модель синхронизатора.
X1 - Перемещение собачьей муфтыВыходной порт физического сигнала, который измеряет величину перемещения муфты собаки.
X2 - Перемещение муфты конусаВыходной порт физического сигнала, который измеряет величину смещения муфты конуса.
HA - Ступица муфты AПорт Механического привода вращения сопоставлен со ступицей A валом муфты.
HB - Ступица муфты BПорт Механического привода вращения сопоставлен со ступицей B валом муфты.
R - звонок сцепленияПорт Механического привода вращения сопоставлен с звонком муфты.
S - Сдвиг редактированияМеханический вращательный порт сопоставлен с сдвигом редактирования.
T - Тепловой потокТепловой порт сопоставлен с тепловым потоком.
Этот порт видим, только если в настройках Friction параметр Friction model установлен на Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients.
Таблица показывает, как заданные опции параметров в настройках Cone Clutch и Dog Clutch влияют на видимость:
Параметры в настройках Cone Clutch, Dog Clutch и Initial Conditions
Thermal Port настройки
Тепловой порт T
Чтобы узнать, как считать таблицу, см. «Параметры».
Double-Sided Synchronizer параметров блоков
| Настройки | Параметры и опции | |||||
|---|---|---|---|---|---|---|
| Cone Clutch | Contact surface maximum diameter | |||||
| Contact surface minimum diameter | ||||||
| Cone half angle | ||||||
| Friction model | ||||||
Fixed kinetic friction coefficient | Velocity-dependent kinetic friction coefficient | Temperature-dependent friction coefficients | Temperature and velocity-dependent friction coefficients | |||
| - | - | Выставляет:
| Выставляет:
| |||
| - | Relative velocity vector | Relative velocity vector | ||||
| - | - | Temperature vector | Temperature vector | |||
| Static friction coefficient | Static friction coefficient vector | Static friction coefficient vector | Static friction coefficient matrix | |||
| Kinetic friction coefficient | Kinetic friction coefficient vector | Kinetic friction coefficient vector | Kinetic friction coefficient matrix | |||
| - | Friction coefficient interpolation method | Friction coefficient interpolation method | Friction coefficient interpolation method | |||
| - | Friction coefficient extrapolation method | Friction coefficient extrapolation method | Friction coefficient extrapolation | |||
| Velocity tolerance | Velocity tolerance | Velocity tolerance | Velocity tolerance | |||
| Threshold force | Threshold force | Threshold force | Threshold force | |||
| Dog Clutch | Torque transmission model | Torque transmission model | - | - | ||
Friction clutch approximation - Suitable for HIL and linearization | Dynamic with backlash | Friction clutch approximation - Suitable for HIL and linearization | Dynamic with backlash | - | - | |
| - | - | - | - | Temperature vector | Temperature vector | |
| Maximum transmitted torque | - | Maximum transmitted torque | - | Maximum transmitted torque vector | Maximum transmitted torque vector | |
| - | - | - | - | Interpolation method | Interpolation method | |
| - | - | - | - | Extrapolation method | Extrapolation method | |
| Clutch teeth mean radius | Clutch teeth mean radius | Clutch teeth mean radius | Clutch teeth mean radius | Clutch teeth mean radius | Clutch teeth mean radius | |
| - | Number of teeth | - | Number of teeth | |||
| Rotational backlash | Rotational backlash | |||||
| - | Torsional stiffness | - | Torsional stiffness | |||
| - | Torsional damping | - | Torsional damping | |||
| - | Tooth-tooth friction coefficient | - | Tooth-tooth friction coefficient | |||
| Initial Conditions | Initial state | Initial state | Initial state | Initial state | Initial state | Initial state |
| Dog clutch initial shift linkage position | Dog clutch initial shift linkage position | Dog clutch initial shift linkage position | Dog clutch initial shift linkage position | Dog clutch initial shift linkage position | Dog clutch initial shift linkage position | |
| Cone clutch initial shift linkage position | Cone clutch initial shift linkage position | Cone clutch initial shift linkage position | Cone clutch initial shift linkage position | Cone clutch initial shift linkage position | Cone clutch initial shift linkage position | |
| - | Initial dog clutch A ring-hub offset angle | - | Initial dog clutch A ring-hub offset angle | - | - | |
| - | Initial dog clutch B ring-hub offset angle | - | Initial dog clutch B ring-hub offset angle | - | - | |
| Thermal Port | - | - | - | - | Thermal mass | Thermal mass |
| - | - | - | - | Initial temperature | Initial temperature | |
Contact surface maximum diameter - Наружный диаметр150
mm (по умолчанию) | положительная скалярная величинаНаружный конический диаметр do.
Contact surface minimum diameter - Внутренний диаметр100
mm (по умолчанию) | положительная скалярная величинаВнутренний конический диаметр di.
Cone half angle - Полуугольник конуса12
deg (по умолчанию) | положительная скалярная величинаПоловина угла открытия α геометрии конуса.
Friction model - Модель тренияFixed kinetic friction coefficient (по умолчанию) | Velocity-dependent kinetic friction coefficient | Temperature-dependent friction coefficients | Temperature and velocity-dependent friction coefficientsМетод параметризации для моделирования кинетического коэффициента трения. Опции и значения по умолчанию для этого параметра зависят от модели трения, которую вы выбираете для блока. Опции:
Fixed kinetic friction coefficient - Задайте фиксированное значение коэффициента кинетического трения.
Velocity-dependent kinetic friction coefficient - Задайте кинетический коэффициент трения одномерным поиском в таблице на основе относительной скорости вращения между дисками.
Temperature-dependent friction coefficients - Определите коэффициент кинетического трения по поиску таблицы на основе температуры.
Temperature and velocity-dependent friction coefficients - Задайте коэффициент кинетического трения по поиску таблицы на основе температуры и относительной скорости вращения между дисками.
Установка модели трения влияет на видимость других параметров, настроек и портов.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Relative velocity vector - Относительная скорость[0, 100, 1000]
rad/s (по умолчанию) | векторВходные значения для относительной скорости как вектора. Значения в векторе должны увеличиться слева направо. Минимальное количество значений зависит от выбранного метода интерполяции. Для линейной интерполяции задайте по крайней мере два значения на размерность. Для сплайна-интерполяции задайте по крайней мере три значения на размерность.
Этот параметр видим, только если параметр Friction model установлен в Velocity-dependent kinetic friction coefficient или Temperature and velocity-dependent friction coefficients.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Temperature vector - Температура[280, 300, 320]
K (по умолчанию) | увеличение вектораВходные значения температуры как вектора. Минимальное количество значений зависит от выбранного метода интерполяции. Для линейной интерполяции задайте по крайней мере два значения на размерность. Для сплайна-интерполяции задайте по крайней мере три значения на размерность. Значения в векторе должны увеличиться слева направо.
Этот параметр видим, только если параметр Friction model установлен в Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Static friction coefficient - Статический коэффициент трения0.35 (по умолчанию) | скаляромСтатическое или пиковое значение коэффициента трения. Статический коэффициент трения должен быть больше, чем кинетический коэффициент трения.
этот параметр видим, только если для параметра Friction model задано значение Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Static friction coefficient vector - Статический коэффициент трения[.4, .38, .36] (по умолчанию) | векторСтатические, или пиковые, значения коэффициента трения в качестве вектора. Вектор должен иметь то же количество элементов, что и вектор температуры. Каждое значение должно быть больше, чем значение соответствующего элемента в векторе коэффициента кинетического трения.
Этот параметр видим, только если параметр Friction model установлен в Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Kinetic friction coefficient - Коэффициент кинетического трения0.3 (по умолчанию) | позитвенный скалярКинетический, или Кулонский, коэффициент трения. Коэффициент должен быть больше нуля.
Этот параметр видим, только если параметр Friction model установлен в Fixed kinetic friction coefficient.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Kinetic friction coefficient vector - Коэффициент кинетического трения[.3, .22, .19] (по умолчанию) | [.3, .28, .25] | векторВыходные значения для коэффициента кинетического трения в качестве вектора. Все значения должны быть больше нуля.
Если для параметра Friction model задано значение
Velocity-dependent kinetic friction coefficient - Вектор должен иметь то же количество элементов, что и вектор относительной скорости.
Temperature-dependent friction coefficients - Вектор должен иметь то же количество элементов, что и вектор температуры.
Этот параметр видим, только если параметр Friction model установлен в Velocity-dependent kinetic friction coefficient или Temperature-dependent friction coefficients.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Kinetic friction coefficient matrix - Коэффициент кинетического трения[.34, .32, .3; .3, .28, .25; .25, .2, .15] (по умолчанию) | матрицаВыходные значения для коэффициента кинетического трения в виде матрицы. Все значения должны быть больше нуля. Размер матрицы должен равняться размеру матрицы, которая является результатом вектора температуры × вектора относительной скорости коэффициента кинетического трения.
Этот параметр видим, только если параметр Friction model установлен в Temperature and velocity-dependent friction coefficients.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Friction coefficient interpolation method - Метод интерполяцииLinear (по умолчанию) | SmoothМетод интерполяции для аппроксимации значения выхода, когда значение входа находится между двумя последовательными сеточными точками:
Linear - Выберите эту опцию, чтобы получить лучшую эффективность.
Smooth - Выберите эту опцию, чтобы создать непрерывную кривую с непрерывными производными первого порядка.
Для получения дополнительной информации об алгоритмах интерполяции смотрите PS Lookup Table (1D) блочной страницы с описанием.
Этот параметр видим, только если в настройках Cone Clutch параметр Friction model равен Velocity-dependent kinetic friction coefficient, Temperature-dependent friction coefficients, или Temperature and velocity-dependent friction coefficients.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Friction coefficient extrapolation method - Метод экстраполяцииLinear (по умолчанию) | Nearest | ErrorМетод экстраполяции для определения значения выхода, когда значение входа находится вне диапазона, заданного в списке аргументов:
Linear - Выберите эту опцию, чтобы создать кривую с непрерывными производными первого порядка в области экстраполяции и на контуре с областью интерполяции.
Nearest - Выберите эту опцию, чтобы создать экстраполяцию, которая не идет выше высшей точки в данных или ниже самой нижней точки в данных.
Error - Выберите эту опцию, чтобы избежать перехода в режим экстраполяции, когда вы хотите, чтобы ваши данные находились в области значений. Если входной сигнал находится вне области значений таблицы, симуляция останавливается и генерирует ошибку.
Для получения дополнительной информации об алгоритмах экстраполяции см. PS Lookup Table (1D) блочной страницы с описанием.
Этот параметр видим, только если в настройках Cone Clutch параметр Friction model равен Velocity-dependent kinetic friction coefficient, Temperature-dependent friction coefficients, или Temperature and velocity-dependent friction coefficients.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Velocity tolerance - Относительный порог блокировки скорости0.001
rad/s (по умолчанию) | скаляромОтносительная скорость, ниже которой две поверхности могут заблокироваться. Поверхности блокируются, если крутящий момент меньше, чем продукт эффективного радиуса, статического коэффициента трения и приложенной нормальной силы.
Threshold force - Нормальный порог контактной силы1
N (по умолчанию) | скаляромНормальная сила прикладывается только, если величина силы превышает значение параметра Threshold force. Силы ниже Threshold force не прикладываются, поэтому переданный фрикционный крутящий момент отсутствует.
Методы, которые доступны для параметризации передачи крутящего момента, зависят от того, является ли модель трения зависящей от температуры.
Модель трения определяется в настройках Cone Clutch установкой Friction model параметра:
Fixed kinetic friction coefficient - Независимая от температуры
Velocity-dependent kinetic friction coefficient - Независимая от температуры
Temperature-dependent friction coefficients - Температурно-зависимый
Temperature and velocity-dependent friction coefficients - Температурно-зависимый
Для модели, не зависящей от температуры, параметризируйте блок с помощью одной из опций для параметра Torque Transmission Model.
Torque transmission model - Модель трансмиссии крутящего моментаFriction clutch approximation — Suitable for HIL and linearization (по умолчанию) | Dynamic with backlashВычислительная среда для моделирования динамического поведения собачьей муфты:
Friction clutch approximation — Suitable for HIL and linearization - Моделируйте сцепление муфты как явление трения между звонком и ступицей. Эта модель, основанная на блоке Fundamental Friction Clutch, обеспечивает вычислительно эффективное приближение муфты собаки.
Dynamic with backlash - Моделируйте сцепление муфты в деталях, учитывая такие явления, как люфт, упругость кручения и контактные силы между звонками и ступицы.
Этот параметр видим, только если в настройках Cone Clutch параметр Friction model равен Fixed kinetic friction coefficient или Velocity-dependent friction coefficients.
Видимость связанных параметров в настройках Dog Clutch и Initial Conditions зависит от опции, которую вы выбираете для этого параметра.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Temperature vector - Температура[280, 300, 320]
K (по умолчанию) | увеличение вектораВходные значения температуры как вектора. Минимальное количество значений зависит от выбранного метода интерполяции. Для линейной интерполяции задайте по крайней мере два значения на размерность. Для сплайна-интерполяции задайте по крайней мере три значения на размерность. Значения в векторе должны увеличиться слева направо.
Этот параметр видим, только если в настройках Cone Clutch параметр Friction model равен Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Maximum transmitted torque - Максимальный передаваемый крутящий момент1000
N*m (по умолчанию) | положительная скалярная величинаСамый большой крутящий момент, который может передать муфта, относящийся к несжимаемому строению. Если крутящий момент, передаваемый между звонком и ступицей, превышает это значение, эти два компонента начинают скользить относительно друг друга. Этот крутящий момент определяет статический предел трения в приближении фрикционной муфты
Этот параметр видим, только если в настройках Cone Clutch параметр Friction model равен Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient и, в Dog Clutch настройках, параметру Torque transmission model задано значение Friction clutch approximation - Suitable for HIL and linearization.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Maximum transmitted torque vector - Максимальный передаваемый крутящий момент[1000, 1050, 1000]
N*m (по умолчанию) | векторСамый большой крутящий момент, который может передать муфта, соответствующему неприемлемому строению, заданной как вектор. Если крутящий момент, передаваемый между звонком и ступицей, превышает это значение, эти два компонента начинают скользить относительно друг друга. Этот крутящий момент определяет статический предел трения в приближении фрикционной муфты. Вектор имеет то же количество элементов, что и вектор температуры.
Этот параметр видим, только если в настройках Cone Clutch параметр Friction model равен Temperature-dependent kinetic friction coefficient или Temperature and velocity-dependent kinetic friction coefficient.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Interpolation method - Метод интерполяцииLinear (по умолчанию) | SmoothМетод интерполяции для аппроксимации значения выхода, когда значение входа находится между двумя последовательными сеточными точками:
Linear - Выберите эту опцию, чтобы получить лучшую эффективность.
Smooth - Выберите эту опцию, чтобы создать непрерывную кривую с непрерывными производными первого порядка.
Для получения дополнительной информации об алгоритмах интерполяции смотрите PS Lookup Table (1D) блочной страницы с описанием.
Этот параметр видим, только если в настройках Cone Clutch параметр Friction model равен Temperature-dependent kinetic friction coefficient или Temperature and velocity-dependent kinetic friction coefficient.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Extrapolation method - Метод экстраполяцииLinear (по умолчанию) | Nearest | ErrorМетод экстраполяции для определения значения выхода, когда значение входа находится вне диапазона, заданного в списке аргументов:
Linear - Выберите эту опцию, чтобы создать кривую с непрерывными производными первого порядка в области экстраполяции и на контуре с областью интерполяции.
Nearest - Выберите эту опцию, чтобы создать экстраполяцию, которая не идет выше высшей точки в данных или ниже самой нижней точки в данных.
Error - Выберите эту опцию, чтобы избежать перехода в режим экстраполяции, когда вы хотите, чтобы ваши данные находились в области значений. Если входной сигнал находится вне области значений таблицы, симуляция останавливается и генерирует ошибку.
Для получения дополнительной информации об алгоритмах экстраполяции см. PS Lookup Table (1D) блочной страницы с описанием.
Этот параметр видим, только если в настройках Cone Clutch параметр Friction model равен Temperature-dependent kinetic friction coefficient или Temperature and velocity-dependent kinetic friction coefficient.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Clutch teeth mean radius - Средний радиус зубьев сцепления50
mm (по умолчанию) | положительная скалярная величинаРасстояние от звонка или центра ступицы до соответствующего центра зуба. Средний радиус зуба определяет нормальные силы контакта между звонком и зубьями ступицы, учитывая крутящий момент передачи между этими двумя компонентами. Значение должно быть больше нуля.
Number of teeth - Количество звонков или ступицы6 (по умолчанию) | положительное ненулевое скалярное целое числоОбщее количество зубьев в звонке или ступице. Эти два компонента имеют одинаковые числа зубов. Значение должно быть больше или равно единице.
Этот параметр видим, только если в настройках Cone Clutch параметр Friction model равен Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient и, в настройках Dog Clutch, параметр Torque transmission model устанавливается на Dynamic with backlash.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Rotational backlash - Вращательная люфт10
deg (по умолчанию) | положительная скалярная величинаДопустимое угловое движение, или перемещение, между звонком и зубьями ступицы в строении сцепления. Значение должно быть больше нуля.
Этот параметр видим, только если в настройках Cone Clutch параметр Friction model равен Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient и, в настройках Dog Clutch, параметр Torque transmission model устанавливается на Dynamic with backlash.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Torsional stiffness - Кручение жесткости10e6
N*m/rad (по умолчанию) | положительная скалярная величинаЛинейный коэффициент жесткости кручения на контактной границе между звонком и зубьями ступицы. Этот коэффициент характеризует восстанавливающий компонент силы контакта между двумя наборами зубов. Большие значения жесткости соответствуют большему силы контакта. Значение должно быть больше нуля. Значение по умолчанию 10e6
N*m/rad.
Этот параметр видим, только если в настройках Cone Clutch параметр Friction model равен Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient и, в настройках Dog Clutch, параметр Torque transmission model устанавливается на Dynamic with backlash.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Torsional damping - Кручение демпфирования100
N*m/(rad/s) (по умолчанию) | положительная скалярная величинаЛинейный коэффициент демпфирования кручения на контактной границе между звонком и зубьями ступицы. Этот коэффициент характеризует рассеивающий компонент силы контакта между двумя наборами зубов. Большие значения демпфирования соответствуют большему рассеиванию энергии во время контакта. Значение должно быть больше нуля.
Этот параметр видим, только если в настройках Cone Clutch параметр Friction model равен Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient и, в настройках Dog Clutch, параметр Torque transmission model устанавливается на Dynamic with backlash.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Tooth-tooth friction coefficient - Коэффициент кинетического трения контакта зуба и зуба0.05 (по умолчанию) | положительная скалярная величинаКоэффициент кинетического трения на контактной границе между звонком и зубьями ступицы. Этот коэффициент характеризует рассеивающую силу, которая сопротивляется смещению редактирования движению из-за контакта зуба и зуба во время зацепления/разъединения муфты.
Большие значения коэффициентов соответствуют большему рассеиванию энергии во время движения редактирования. Значение должно быть больше нуля.
Этот параметр видим, только если в настройках Cone Clutch параметр Friction model равен Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient и, в настройках Dog Clutch, параметр Torque transmission model устанавливается на Dynamic with backlash.
Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Peak force - Пиковая сила сдвига500
N (по умолчанию) | неотрицательной скаляромПиковая сила сдвига фиксатора.
Notch width - Ширина выемки3
mm (по умолчанию) | неотрицательной скаляромШирина области, в которой стопор проявляет силу сдвига.
Viscous friction coefficient - Коэффициент вязкого трения0.1
N/(m/s) (по умолчанию) | неотрицательной скаляромКоэффициент вязкого трения на контактной поверхности фиксатора. Значение должно быть больше или равно нулю.
Friction to peak force ratio - Отношение трения к пиковой силе0.01 (по умолчанию) | неотрицательной скаляромОтношение кинетического трения к пиковой силе сдвига фиксатора. Параметр используется, чтобы задать значение кинетического трения. Параметр должен быть больше или равен нулю.
Friction velocity threshold - Порог скорости кинетического трения0.05
m/s (по умолчанию)Скорость, требуемая для пикового кинетического трения на контактной поверхности фиксатора. Параметр обеспечивает непрерывность силы при изменении направления перемещения, увеличивая числовую устойчивость симуляции. Параметр должен быть больше нуля. Значение по умолчанию 0.05
m/s.
Maximum engagement speed - Верхний порог скорости зацепленияinf (по умолчанию) | положительная скалярная величинаОтносительная скорость вращения между звонком и ступицей, выше которой муфта не может зацепиться. Значение характерно для конкретной коробки передач или трансмиссии. Минимизация значения помогает избежать высокого динамического влияния во время зацепления. Значение должно быть больше нуля.
Tooth overlap to engage - Порог зацепления перекрытия зуба3
mm (по умолчанию) | положительная скалярная величинаДлина перекрытия между звонком и зубьями ступицы вдоль общей продольной оси, над которой может зацепляться муфта. Муфта остается разцепленной до тех пор, пока зубец не перекроется, по меньшей мере, на эту длину. Значение должно быть больше нуля.
Tooth height - Высота зуба10
mm (по умолчанию) | положительная скалярная величинаРасстояние между основой и гребнем зуба. Звонок и зубья ступицы имеют одинаковую высоту. Высота зуба и зазор в кольцевой ступице при полном расцеплении определяют максимальный промежуток перемещения редактирования сдвига. Значение должно быть больше нуля.
Ring-hub clearance when disengaged - Зазор кольцевой ступицы при разъединении3
mm (по умолчанию) | положительная скалярная величинаМаксимальный открытый зазор между зубьями звонка и ступицы находится вдоль оси сдвига редактирования перемещения. Этот зазор соответствует состоянию полностью отключенного сцепления. Высота зуба и зазор в кольцевой ступице при полном расцеплении определяют максимальный промежуток перемещения редактирования сдвига. Значение должно быть больше нуля.
Hard stop at back of shift linkage - Модель жёсткого упораOn (по умолчанию) | OffЖёсткий упор, препятствующая выходу сдвига редактирования за пределы полностью отключенного положения:
On - Жёсткий упор при полном отключении.
Off - Нет жёсткого упора при полном отключении.
Dog clutch ring stop stiffness - Упорная жесткость звонка собачьей муфты10e5
N/m (по умолчанию) | положительная скалярная величинаЖесткость жёстких упоров по обе стороны звонка собачьей муфты. Модель предполагает, что звонок и упоры ведут себя упруго. Контактная деформация пропорциональна приложенной силе и возвратно-поступательной упругости контакта. Значение жесткости должно быть присвоено со ссылкой на Tooth overlap to engage параметра. Слишком низкая жесткость может привести к тому, что деформация превысит необходимое перекрытие и инициирует ложное зацепление. Параметр должен быть больше нуля.
Cone clutch ring stop stiffness - Кольцевая жесткость кольцевой муфты конуса10e5
N/m (по умолчанию) | положительная скалярная величинаЖесткость жёстких упоров по обе стороны звонка сцепления конуса. Модель предполагает, что звонок и упоры ведут себя упруго. Контактная деформация пропорциональна приложенной силе и возвратно-поступательной упругости контакта.
Dog clutch ring stop damping - Демпфирование звонка собачьей муфты1e3
N/(m/s) (по умолчанию) | неотрицательной скаляромДемпфирование поступательного контакта между звонком собачьей муфты и ступицей. Значение демпфирования обратно пропорционально количеству колебаний, происходящих после влияния. Параметр должен быть больше нуля.
Cone clutch ring stop damping - Демпфирование кольцевой муфты конуса1e3
N/(m/s) (по умолчанию) | неотрицательной скаляромПоступательный контакт демпфирования между звонком сцепления конуса и ступицей. Значение демпфирования обратно пропорционально количеству колебаний, происходящих после влияния. Параметр должен быть больше нуля.
Shift linkage viscous friction coefficient - Коэффициент вязкого трения сдвига редактирования100
N/(m/s) (по умолчанию) | положительная скалярная величинаКоэффициент вязкого трения для относительного поступательного движения между ступицей и звонком. Значение параметра зависит от состояния смазки и качества контактирующих поверхностей. Коэффициент должен быть больше или равен нулю.
Initial state - Начальное состояние муфтыAll clutches unlocked (по умолчанию) | Cone clutch A and dog clutch A locked | Cone clutch A locked | Cone clutch B locked | Cone clutch B and dog clutch B lockedНачальное строение муфты конуса и собаки:
Cone clutch A and dog clutch A locked - Коническая муфта A и собачная муфта A передачи крутящего момента между звонком и валами ступицы.
Cone clutch A locked - Коническая муфта A передает крутящий момент между звонком и валами ступицы.
All clutches unlocked- Муфты конуса и собаки передают нулевой крутящий момент между звонком и валами ступицы.
Cone clutch B locked - Коническая муфта B передает крутящий момент между звонком и валами ступицы.
Cone clutch B and dog clutch B locked - Коническая муфта B и собачная муфта B передачи крутящего момента между звонком и валами ступицы.
Dog clutch initial shift linkage position - Положение начального сдвига муфты собаки0
mm (по умолчанию) | скаляромНачальное положение участка сдвига редактирования, который крепится к собачьей муфте. Значение параметра имеет следующие ограничения:
| Состояние сцепления с собакой | Ограничение параметра |
|---|---|
| Собачья муфта A Первоначально помолвлена | Отрицательное значение значения параметров должно быть больше суммы параметров Ring-hub clearance when dog clutch disengaged и Tooth overlap to engage |
| Собачья муфта A Первоначально отключена | Отрицание значения параметров должно быть меньше суммы параметров Ring-hub clearance when dog clutch disengaged и Tooth overlap to engage |
| Собачья муфта B Первоначально помолвлена | Значение параметров должно быть больше суммы параметров Ring-hub clearance when dog clutch disengaged и Tooth overlap to engage |
| Собачья муфта B Первоначально отключена | Значение параметров должно быть меньше суммы параметров Ring-hub clearance when dog clutch disengaged и Tooth overlap to engage |
Cone clutch initial shift linkage position - Положение начального сдвига муфты конуса0
mm (по умолчанию) | скаляромНачальное положение секции сдвига редактирования, которая крепится к муфте конуса. Значение параметра имеет следующие ограничения:
| Состояние муфты конуса | Ограничение параметра |
|---|---|
| Муфта А конуса первоначально включена | Отрицание параметра должно быть больше значения Ring-hub clearance when cone clutch disengaged |
| Первоначально отключенная муфта А конуса | Отрицание параметра должно быть меньше значения Ring-hub clearance when cone clutch disengaged |
| Коническая муфта B первоначально включена | Параметр должен быть больше, чем значение Ring-hub clearance when cone clutch disengaged |
| Коническая муфта B первоначально отключена | Параметр должен быть меньше, чем значение Ring-hub clearance when cone clutch disengaged |
Initial dog clutch A ring-hub offset angle - Начальная собачья муфта B углом смещения кольцо-ступица0
deg (по умолчанию) | скаляромУгол поворота между звонком и ступицей собачьей муфты B во время симуляции нуль. Этот угол определяет, могут ли звонок и зубья ступицы блокироваться, и, следовательно, может ли сцепление зацепляться. Начальный угол смещения должен удовлетворять следующим условиям:
Если начальное состояние муфты отключено, угол начального смещения должен упасть в области значений
где N - количество зубьев, присутствующих в звонке или ступице. Эти два компонента содержат одинаковое количество зубов.
Если начальное состояние муфты включено, угол начального смещения должен упасть в области значений
где δ - угол люфта между звонком и зубьями ступицы.
Этот параметр видим только, когда оба из этих условий удовлетворены:
В настройках Cone Clutch параметр Friction model устанавливается на Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient.
В настройках Dog Clutch Torque transmission model устанавливается на Dynamic with backlash.
Initial dog clutch B ring-hub offset angle - Начальная собачья муфта A углом смещения кольцо-ступица0
deg (по умолчанию) | скаляромУгол поворота между звонком и ступицей во время симуляции нуль. Этот угол определяет, могут ли звонок и зубья ступицы блокироваться, и, следовательно, может ли сцепление зацепляться. Начальный угол смещения должен удовлетворять следующим условиям:
Если начальное состояние муфты отключено, угол начального смещения должен упасть в области значений
где N - количество зубьев, присутствующих в звонке или ступице. Эти два компонента содержат одинаковое количество зубов.
Если начальное состояние муфты включено, угол начального смещения должен упасть в области значений
где δ - угол люфта между звонком и зубьями ступицы.
Этот параметр видим только, когда оба из этих условий удовлетворены:
В настройках Cone Clutch параметр Friction model устанавливается на Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient.
В настройках Dog Clutch Torque transmission model устанавливается на Dynamic with backlash.
Thermal Port настройки видны, только если в настройках Cone Clutch параметр Friction model установлен на Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients. Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Thermal mass - Тепловая масса50
kJ/K (по умолчанию) | скаляромТепловая энергия, необходимая для изменения температуры компонента на одну степень. Чем больше тепловая масса, тем более устойчивым компонентом является изменение температуры.
Этот параметр видим только, когда в настройках Cone Clutch параметр Friction model равен Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients. Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Initial temperature - Начальная температура300
K (по умолчанию) | скаляромТемпература компонента в начале симуляции. Начальная температура изменяет эффективность компонента в соответствии с заданным вектором эффективности, влияя на начальное зацепление или потери на трение.
Этот параметр видим только, когда в настройках Cone Clutch параметр Friction model равен Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients. Для получения дополнительной информации см. Раздел «Зависимости параметров блоков двусторонней синхронизации».
Эти тепловые параметры видны только при выборе зависящей от температуры модели трения.
Тепловая энергия, необходимая для изменения температуры компонента на одну степень. Чем больше тепловая масса, тем более устойчивым компонентом является изменение температуры. Значение по умолчанию 100 kJ/K.
Температура компонента в начале симуляции. Начальная температура изменяет эффективность компонента в соответствии с заданным вектором эффективности, влияя на начальное зацепление или потери на трение. Значение по умолчанию 300 K.
Чтобы оптимизировать модель для линеаризации, используйте настройку по умолчанию параметра Dog Clutch > Torque transmission model, Friction clutch approximation - Suitable for HIL and linearization.
Для оптимальной эффективности симуляции используйте настройку по умолчанию Dog Clutch > Torque transmission model параметра, Friction clutch approximation - Suitable for HIL and linearization.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
