Типовой двигатель и привод с управлением крутящим моментом с обратной связью
Simscape/Driveline/Двигатели и двигатели
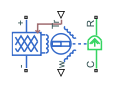
Блок Motor & Drive представляет типовой бесщеточный двигатель и привод с управлением крутящим моментом с обратной связью. Это упрощенная версия блока Motor & Drive (System Level) (Simscape Electrical). Блок Motor & Drive полезен, если вам нужна универсальная или низкоточная реализация двигателя в вашей системе. Это также подходит для случаев, когда вы не знаете всех ваших спецификаций двигателя или хотите использовать блок, чтобы найти подходящий двигатель для вашей системы.
Чтобы включить более быструю симуляцию, блок абстрагирует двигатель, электронику привода и управление. Блок генерирует огибающую крутящего момента-скорости, которая насыщает входной крутящий момент, и он позволяет только область значений крутящих моментов и скоростей, которые задает огибающая.
Блок Motor & Drive моделирует потери первого порядка на основе общей эффективности для заданных скорости и крутящего момента, которые вы задаете как Motor and driver overall efficiency (percent), Speed at which efficiency is measured и Torque at which efficiency is measured, соответственно. Блок использует скорость и крутящий момент, чтобы сгенерировать огибающую крутящего момента. Огибающая насыщает входной крутящий момент, который приводит к крутящему моменту, на который реагирует двигатель, τelec. Это также крутящий момент, который блок использует для вычисления электрических потерь.
Блок рассматривает только зависящие от крутящего момента потери сопротивления, такие что
где
Потери сопротивления также известны как омические потери и происходят из-за склонности обмоток якоря противостоять потоку электронов. Электрическая степень включает эти потери, такие что
Скорость преобразования электрической энергии в тепловую определяется законом Джоуля:
где:
Pelec является электрической степенью, которую блок вычисляет и использует в управляющем уравнении.
Plosses электрическая степень потеряна во время операции. Когда вы моделируете эффекты теплового потока и изменения температуры, это значение представляет скорость теплового потока, которая распределяется в тепловую массу или выходной порт H.
ω - скорость вращения ротора. Это эквивалентно W значению выходного порта.
τelec - потребность в насыщенном крутящем моменте.
k - константа пропорциональности потерь сопротивления, которая имеет модули измерения (энергия * время)-1.
η - эффективность двигателя и драйвера для заданных скорости и крутящего момента. Это значение эквивалентно параметру Motor and driver overall efficiency (percent).
ωη - скорость вращения, которая соответствует общей эффективности. Это значение эквивалентно параметру Speed at which efficiency is measured.
τη - крутящий момент, который соответствует общей эффективности. Это значение эквивалентно параметру Torque at which efficiency is measured.
V - напряжение на клеммах.
I - ток через клеммы.
Когда вы включите тепловое моделирование, Plosses представляет вклад блока в тепловой поток.
Чтобы включить последовательное сопротивление, фиксированные потери и потери в железе, можно добавить блоки к модели или использовать блок Motor & Drive (System Level) (Simscape Electrical).
Совет
Можно добавить демпфирование и инерцию с Rotational Damper блоком и блоком Inertia, соответственно.
Можно смоделировать эффекты теплового потока и изменения температуры, включив дополнительный тепловой порт. Чтобы включить порт, установите Thermal port равным Model.
Когда вы моделируете эффекты теплового потока и изменения температуры, электрические потери от двигателя способствуют этим эффектам.
Используйте вкладку Variables, чтобы задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Задать приоритет и Начальный целевой объект для основных переменных.
Чтобы включить эту настройку, установите Thermal port равным Model.
Драйвер мотора отслеживает крутящий момент с постоянными по времени Tc.
Колебания скорости двигателя из-за механической нагрузки не влияют на отслеживание крутящего момента двигателя.
Двигатель и привод (уровень системы) (Simscape Electrical)




