Этот пример показывает, как смоделировать привод двойного действия с Simscape™ Multibody™ и Simscape. Simscape Multibody моделирует механическую систему цилиндра, а Simscape моделирует гидравлическую систему. Можно использовать Translational Multibody Interface блок для соединения двух систем.
На схемах показан цилиндр в трёх строениях: полуубранный, полностью убранный и полностью удлиненный.
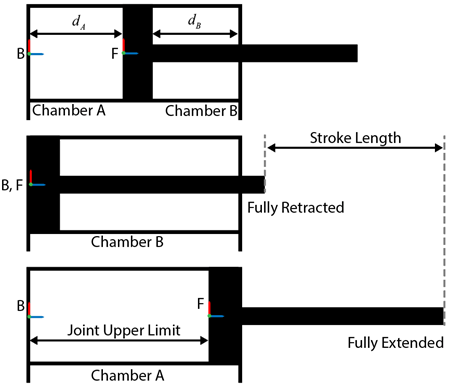
Можно смоделировать механическую часть системы в Simscape Multibody. Для примера, чтобы смоделировать цилиндр и поршень, можно использовать блоки Revolved Solid (Simscape Multibody) и Cylindrical Solid (Simscape Multibody). Чтобы обеспечить поступательную степень свободы поршня, используйте Prismatic Joint (Simscape Multibody) блок. Чтобы легко вычислить длины ёмкостей A и B, можно прикрепить базовую систему координат (B) и последующую систему координат (F) соединения к центрам левой внутренней поверхности ёмкости A и левой поверхности поршня соответственно. Убедитесь, что Z-оси B и F систем координат совмещены, и обе точки направлены к ёмкости B.
Используя это условие, длину ёмкости A, , - выход положения блока соединений и длина ёмкости B, , равен различию длин штриха и . Чтобы убедиться, что поршень не выходит за пределы концов цилиндра, можно задать верхний и нижний пределы положения Prismatic Joint блока.
Примечание
Перед присоединением систем координат соединений в нужных местоположениях необходимо создать пользовательские системы координат. Смотрите Пользовательские Твердые Системы Координат (Simscape Multibody) для получения дополнительной информации.
Этот рисунок показывает блок модели гидроцилиндра двойного действия, описанной выше. Пример использует два блока Translational Mechanical Converter (IL), чтобы смоделировать ёмкости A и B цилиндра. Блок Translational Multibody Interface соединяет блоки Translational Mechanical Converter (IL) с блоком Prismatic Joint. Для получения дополнительной информации о том, как использовать блок Translational Multibody Interface, см. раздел «Подключение сетей Simscape к Simscape Multibody».
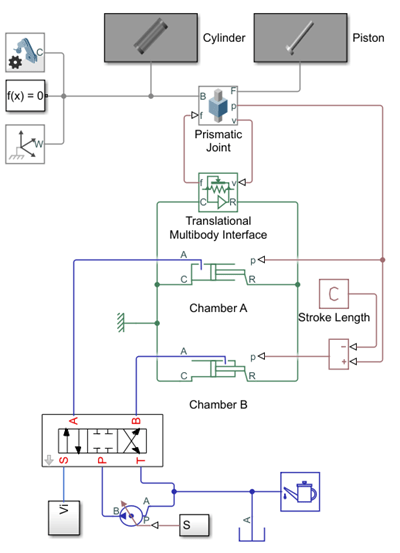
В ёмкости A давление в порте A перемещает поршень от 0 до длины хода. Перемещение поршня равняется выходу положения блока Prismatic Joint. Для моделирования ёмкости A:
Соедините порты C и R блока Translational Multibody Interface с портами C и R верхнего блока Translational Mechanical Converter (IL) соответственно.
В блоке Translational Mechanical Converter (IL) установите Interface displacement равным Provide input signal from Multibody joint для включения p портов.
Соедините порты p блока Prismatic Joint и Translational Mechanical Converter (IL) блока.
В ёмкости B давление в порте A перемещает поршень с 0 на отрицательную длину штриха. Поэтому вам нужно изменить ориентацию по умолчанию и добавить смещение к входному сигналу положения нижнего блока Translational Mechanical Converter (IL). Смещение равняется -.
В нижнем блоке Translational Mechanical Converter (IL) установите Mechanical orientation равным Pressure at A causes negative displacement of R relative to C.
Установите Interface displacement значение Provide input signal from Multibody joint чтобы включить p портов.
Добавьте блок PS Constant и задайте константу в качестве длины штриха.
Добавьте блок PS Subtract, затем соедините его с блоками PS Constant и Prismatic Joint, как показано на схеме. Обратите внимание, что выход блока PS Subtract равен -.
Для ограничения хода поршня:
В блоке Prismatic Joint, под разделом Limits, выберите параметры Specify Lower Limit и Specify Upper Limit.
В разделе Specify Lower Limit параметр Bound указывает минимальное расстояние между системами координат B и F блока соединений. В этом примере задайте параметр Bound равным 0 m.
При Specify Upper Limit параметр Bound указывает максимальное расстояние между системами координат B и F блока Prismatic Joint. В этом примере задайте параметр Bound как длину штриха цилиндра.
Гидроцилиндры двойного действия могут использоваться во многих приложениях. Например, самосвал может использовать гидроцилиндр двойного действия для приведения в действие механизма подъема ножниц, который поднимает и опускает демпфирующий слой. Для получения дополнительной информации смотрите Гидравлический Интерфейс - Трейлер Дампа с Гидравлическим Цилиндром (Simscape Multibody). Под маской блока Гидроцилиндра Двойного Действия в ножничном подъемнике находятся механическая и гидравлическая подсистемы, которые соединяются блоком Translational Multibody Interface. Блок Prismatic Joint в механической подсистеме предоставляет информацию о положении двум приводам в гидравлической подсистеме, Головной Ёмкости и Нижней Ёмкости, которые имеют противоположные настройки параметра Mechanical orientation. Блок Константа C обеспечивает смещение сигнала положения привода Ёмкости Головки, потому что, когда Нижняя Ёмкость находится в мертвом объеме (где положение p = 0), Ёмкость Головки находится в максимальном штрихе.
Rotational Multibody Interface | Translational Multibody Interface
