В этом примере вы собираетесь смоделировать простую механическую систему и наблюдать за ее поведением при различных условиях. Это руководство иллюстрирует важные шаги к созданию физической модели и знакомит вас с использованием основных блоков Simscape™.
Примечание
Для методов времени и продвинутых способов анализа данных симуляции смотрите руководство «Основные шаги для построения физической модели».
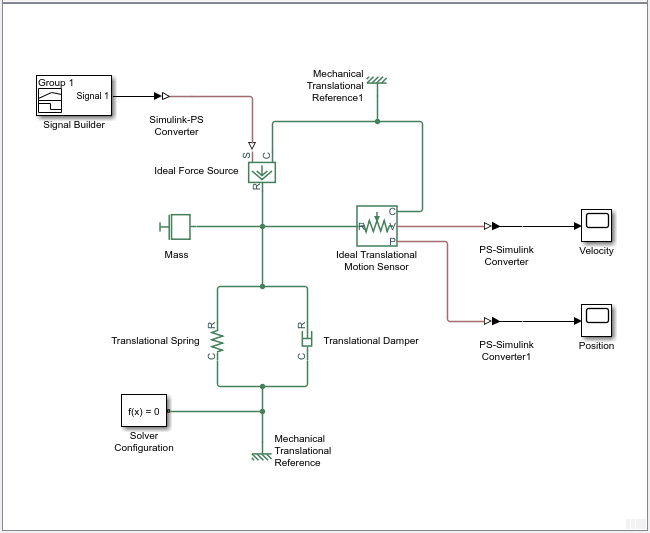
Следующая схема представляет простую модель подвески автомобиля. Она состоит из пружины и демпфера, соединённых с телом (представленным в виде массы), которое перемешивается силой. Можно изменить параметры модели, такие как жесткость пружины, масса тела или профиль силы, и просмотреть результирующие изменения скорости и положения тела.
Чтобы создать эквивалентную схему Simscape, выполните следующие шаги:
Откройте Simulink® Браузер библиотек, как описано в Simscape Библиотеки Блоков.
Создайте новую модель Simulink с помощью шаблона Blank Model. Программа создает пустую модель в памяти и отображает ее в новом окне редактора моделей.
Примечание
Кроме того, можно вводить ssc_new в MATLAB® Командная строка, для создания новой модели, предварительно заполненной определенными необходимыми и обычно используемыми блоками. Для получения дополнительной информации смотрите Создание новой модели Simscape.
По умолчанию Редактор скрывает автоматические имена блоков в диаграммах модели. Чтобы отобразить скрытые имена блоков в целях обучения, снимите флажок Hide Automatic Block Names. Для получения дополнительной информации см. раздел «Управление именами блоков и портами».
Откройте библиотеку Simscape > Библиотека фундаментов > Mechanical > Translational Elements.
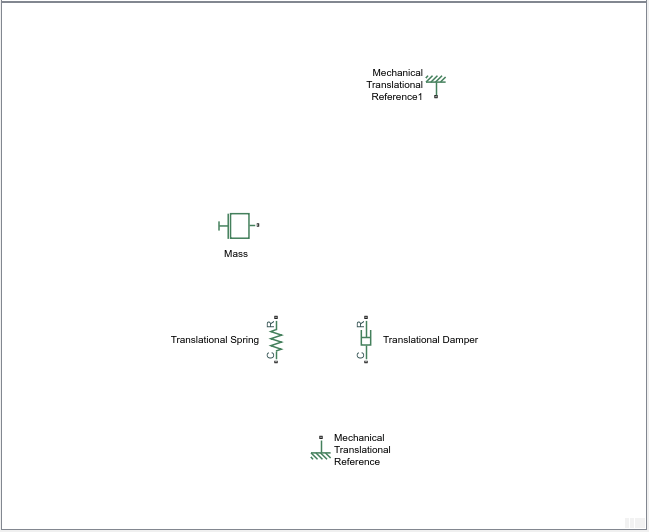
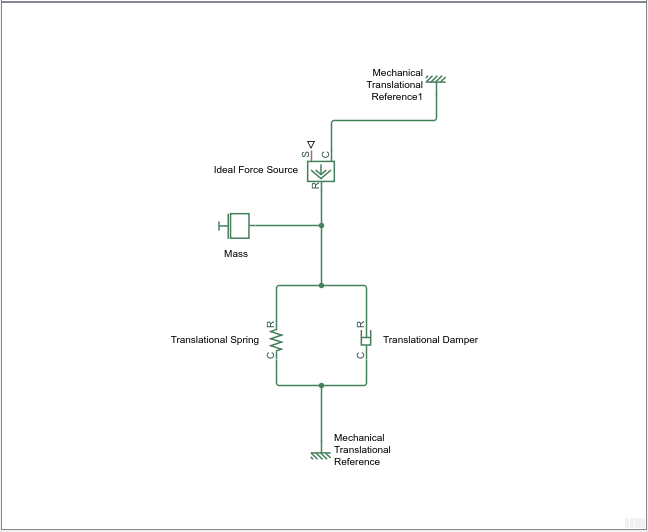
Перетащите Mass, Translational Spring, Translational Damper и два блока Mechanical Translational Reference в окно модели.
Ориентируйте блоки как показано на следующем рисунке. Чтобы повернуть блок, выберите его и нажмите Ctrl+R.
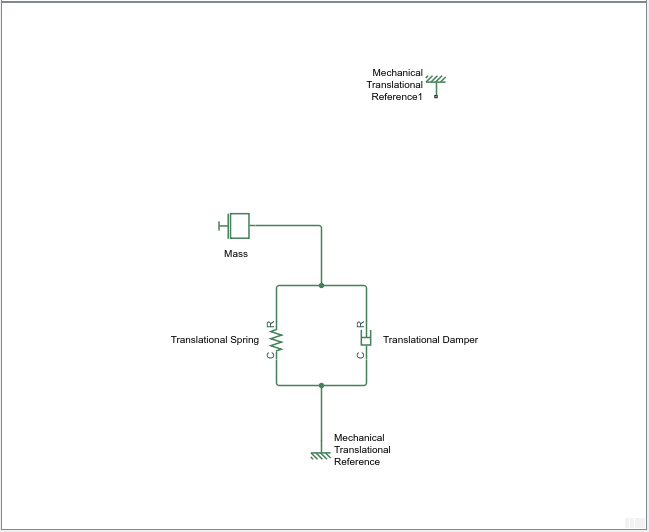
Соедините Translational Spring, Translational Damper и Mass блоки с одним из блоков Mechanical Translational Reference, как показано на следующем рисунке.
Чтобы добавить представление силы, действующей на массив, откройте библиотеку Simscape > Библиотека фундаментов > Mechanical > Mechanical Sources и добавьте Ideal Force Source блок к схеме.
Чтобы отразить правильное направление силы, показанной на исходной схеме, разверните ориентацию блока. Когда выбран Ideal Force Source блок, на вкладке Format в верхней части окна модели, под Arrange, нажмите Flip up-down. Подключите порт блока C (для «случая») ко второму блоку Mechanical Translational Reference и его порт R (для «штока») к блоку Mass, как показано ниже.
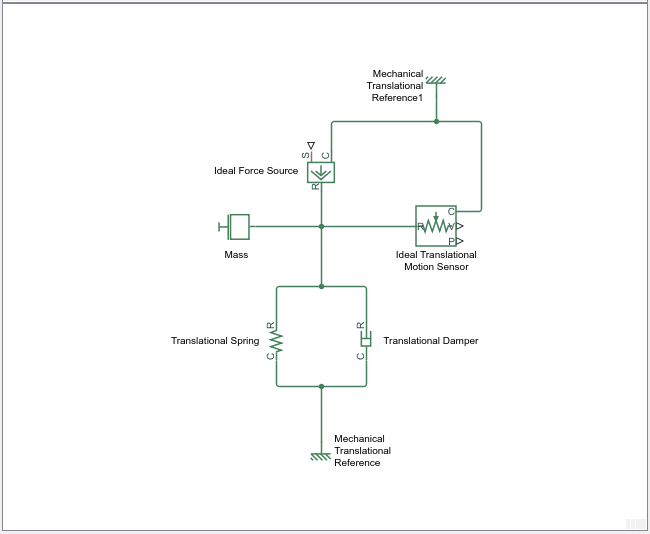
Добавьте датчик для измерения скорости и положения массы. Поместите блок Ideal Translational Motion Sensor из библиотеки Mechanical Sensors в схему и соедините его как показано ниже.
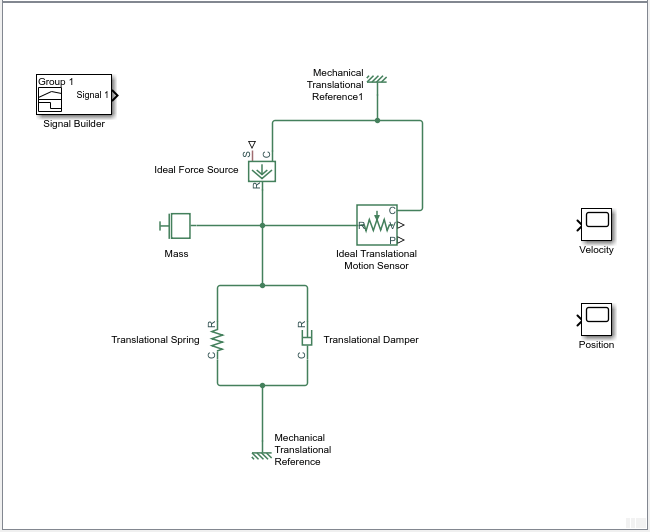
Теперь необходимо добавить источники и возможности. Они находятся в библиотеках Simulink. Откройте библиотеку Simulink > Sources и скопируйте блок Signal Builder в модель. Затем откройте библиотеку Simulink > Sinks и скопируйте два блока Scope. Переименуйте один из блоков Scope в Velocity и другой, чтобы Position.
Каждый раз, когда вы соединяете источник Simulink или возможности с схемой Simscape, вы должны использовать соответствующий блок конвертера, чтобы преобразовать сигналы Simulink в физические сигналы и наоборот. Откройте библиотеку Simscape > Utilities и скопируйте в модель блок Simulink-PS Converter и два блока PS-Simulink Converter. Соедините блоки как показано ниже.
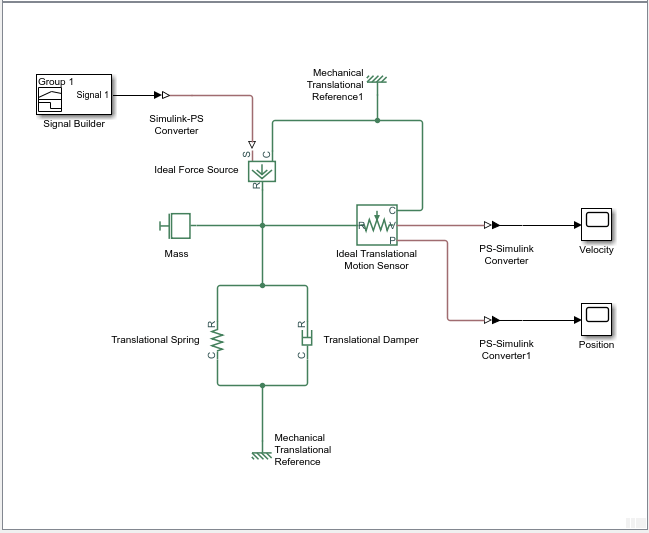
Каждая топологически отличная физическая сеть в схеме требует ровно одного Solver Configuration блока, найденного в библиотеке Simscape > Utilities. Скопируйте этот блок в свою модель и соедините его с схемой путем создания точки ветви и соединения его с единственным портом блока Solver Configuration. Теперь ваша схема должна выглядеть так.
Теперь ваш блок завершён. Сохраните его как mech_simple.
После того, как вы собрали блок вашей модели, как описано в предыдущем разделе, необходимо выбрать решатель и предоставить правильные значения параметров конфигурации.
Чтобы подготовиться к симуляции модели, выполните следующие шаги:
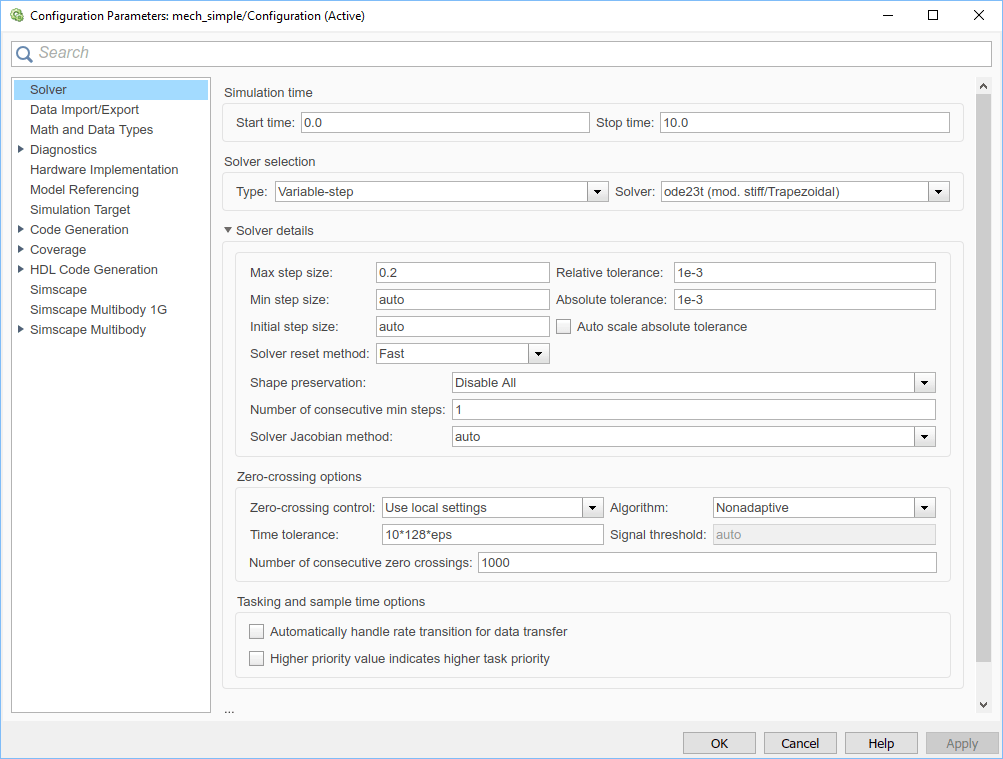
Выберите решатель Simulink. В окне модели откройте вкладку Modeling и нажмите Model Settings. Откроется диалоговое окно Параметры конфигурации (Configuration Parameters), в котором отображается панель Solver.
В разделе Solver selection установите Solver равным ode23t (mod.stiff/Trapezoidal).
Разверните Solver details и установите Max step size равным 0.2.
Кроме того, обратите внимание, что Simulation time задано в диапазоне от 0 до 10 секунд. Вы можете настроить эту настройку позже, при необходимости.
Нажмите кнопку OK, чтобы закрыть диалоговое окно Параметры конфигурации (Configuration Parameters).
Сохраните модель.
После того, как вы собрали блок схему и указали начальные настройки для вашей модели, можно запустить симуляцию.
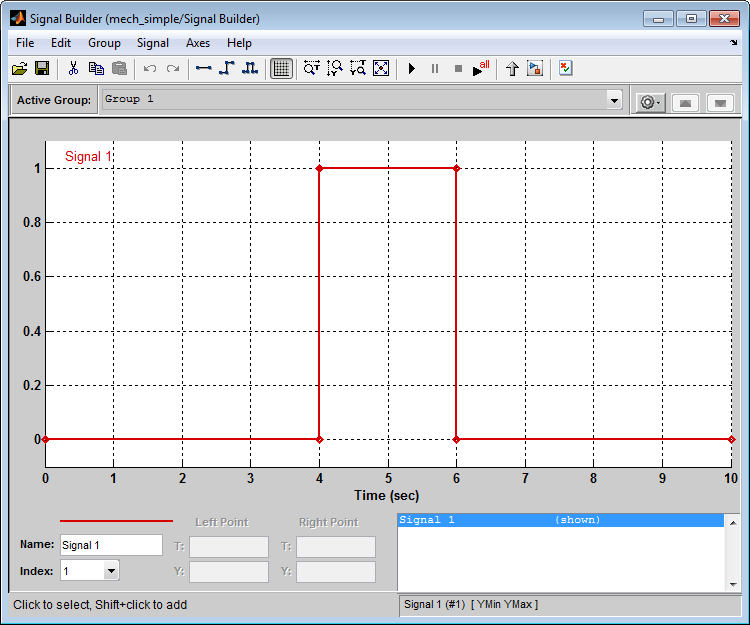
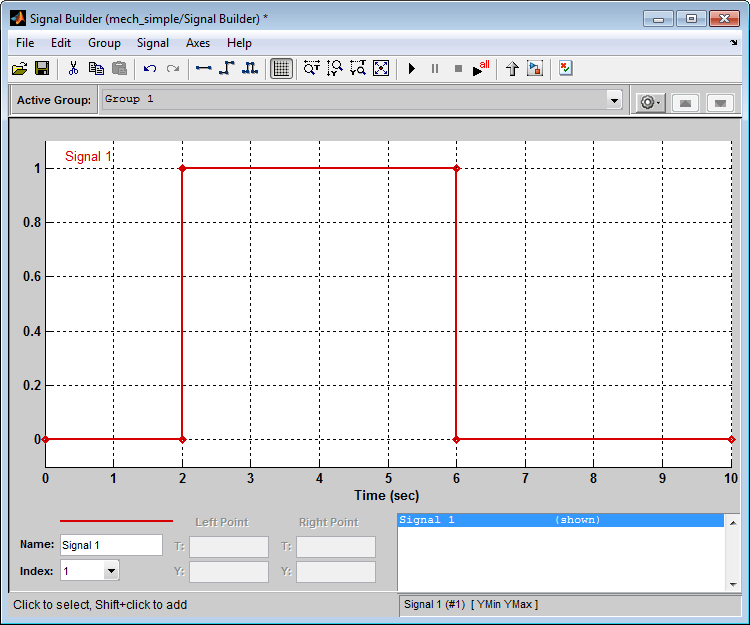
Входной сигнал для силы обеспечивается блоком Signal Builder. Профиль сигнала показан на рисунке ниже. Он начинается со значения 0, затем на 4 секунде происходит изменение шага на 1, а затем он меняется назад на 0 на 6 секундах. Это профиль по умолчанию.
Область возможностей скорости выводит массовую скорость, а возможности положения выводят перемещение массы как функцию времени. Дважды кликните обеих возможности, чтобы открыть их.
Нажмите кнопку. ![]() Решатель Simscape оценивает модель, вычисляет начальные условия и запускает симуляцию. Подробное описание этого процесса см. в разделе «Как работает симуляция Simscape». Выполнение этого шага может занять несколько секунд. Сообщение в левом нижнем углу окна модели предоставляет обновление статуса.
Решатель Simscape оценивает модель, вычисляет начальные условия и запускает симуляцию. Подробное описание этого процесса см. в разделе «Как работает симуляция Simscape». Выполнение этого шага может занять несколько секунд. Сообщение в левом нижнем углу окна модели предоставляет обновление статуса.
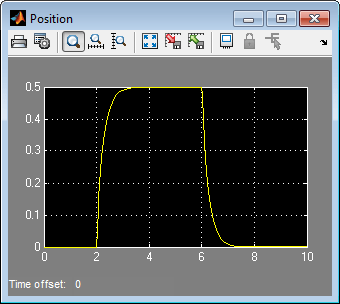
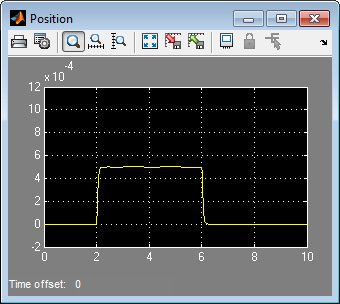
Когда симуляция начинает выполняться, окна возможности скорости и положения отображают результаты симуляции, как показано на следующем рисунке.
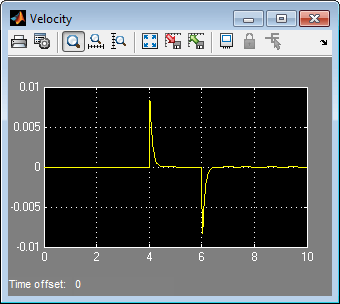
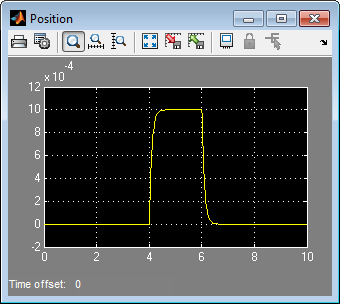
В начале масса находится в состоянии покоя. Затем в 4 секунды, когда входной сигнал изменяется резко, массовая скорость колеблется в положительном направлении и постепенно возвращается к нулю. Положение массы в то же время изменяется более постепенно, из-за инерции и демпфирования, и остается на новом значении, пока сила действует на него. На 6 секунде, когда входной сигнал изменяется назад на нуль, скорость получает спик зеркала, и масса постепенно возвращается в исходное положение.
Теперь можно настроить различные входы и параметры блоков и увидеть их эффект на массовую скорость и перемещение.
После запуска начальной симуляции можно экспериментировать с корректировкой различных входов и параметров блоков.
Попробуйте следующие корректировки:
Этот пример показывает, как изменение входного сигнала влияет на профиль силы, и, следовательно, на перемещение массы.
Дважды кликните блок Signal Builder, чтобы открыть его.
Щелкните первый вертикальный сегмент профиля сигнала и перетащите его в интервал от 4 до 2 секунд, как показано ниже. Закройте диалоговое окно блока.
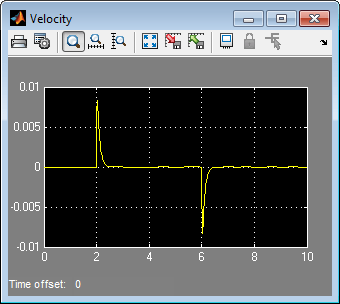
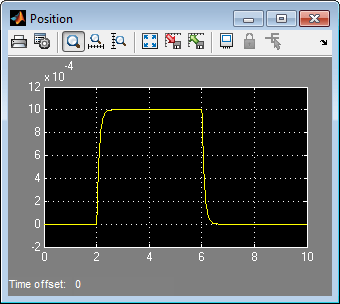
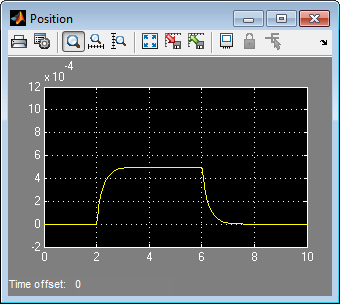
Запустите симуляцию. Результаты симуляции показаны на следующем рисунке.
В нашей модели сила действует на массу против поступательной пружины и демпфера, соединенных параллельно. Этот пример показывает, как изменения жесткости пружины и вязкости демпфера влияют на перемещение массы.
Дважды кликните Translational Spring блок. Установите его Spring rate равной 2000 N/m.
Запустите симуляцию. Увеличение жесткости пружины приводит к меньшей амплитуде перемещения массы, как показано на следующем рисунке.
Далее дважды кликните блок Translational Damper. Установите его Damping coefficient равной 500 N/(m/s).
Запустите симуляцию. Из-за увеличения вязкости масса медленнее как при достижении своего максимального смещения, так и при возвращении в исходное положение, как показано на следующем рисунке.
В нашей модели мы использовали блок PS-Simulink Converter в его строении параметра по умолчанию. Поэтому Position возможности выводит перемещение массы в единицах измерения длины по умолчанию, то есть в метрах. В этом примере показано, как изменить выходные модули для перемещения массы на миллиметры.
Дважды кликните блок Converter1 PS-Simulink. Тип mm в поле со списком Output signal unit и нажмите OK.
Запустите симуляцию. В Position Возможностями окне щелкните![]() , чтобы автоматически изменить масштаб осей возможностей. Перемещение массы теперь выводится в миллиметрах, как показано на следующем рисунке.
, чтобы автоматически изменить масштаб осей возможностей. Перемещение массы теперь выводится в миллиметрах, как показано на следующем рисунке.