Идентифицируйте соответствующие тела, соединения и ограничения, которые нужно включить в модель. Рассмотрим силы и крутящие моменты, действующие между телами или непосредственно на соединения.
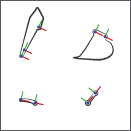
Задайте твердые свойства различных тел. Добавьте системы координат к телам, чтобы можно было соединить соединения и ограничения, применить силы и крутящие моменты и осмыслить движение. Смотрите Модель Простого Звена для примера, показывающего, как смоделировать простое тело - тело, содержащее одно твердое тело. Смотрите Try It: Создайте составную геометрию для более подробного примера, показывающего, как смоделировать составное тело - тело, содержащее несколько твердых частиц.
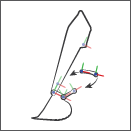
Соедините тела парами через соединения. Ограничьте движение тела через передачи и другие кинематические ограничения. Пример, показывающий, как соединить тела через соединения, см. в разделе Модели кинематической цепи разомкнутой системы. См. Модель Train составной передачи для примера, показывающего, как ограничивать движение через передачи.
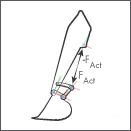
Моделирует внешние нагрузки, взаимодействия между телами и входные параметры приведения в действие соединений. Осмыслите силы, крутящие моменты и переменные движения как функции времени. Пример, показывающий, как задать крутящий момент приведения в действие соединения, см. в разделе «Задание крутящего момента приведения в действие соединения». Смотрите Sense Motion Using a Transform Sensor Block для примера, показывающего, как чувствовать положение системы координат, используя Transform Sensor блок.
