Планетарные зубчатые передачи распространены в промышленных, автомобильных и аэрокосмических системах. Типичным применением является система автоматической коробки передач автомобиля. С кинематической точки зрения, то, что отличает этот механизм, является кинематическим ограничительным множеством между зубчатыми парами. Эти ограничения фиксируют коэффициенты скорости вращения зубчатых пар, заставляя передачи в каждой паре двигаться синхронно.
В Simscape™ Multibody™ вы представляете кинематическое ограничение между сетчатыми зубчатыми колесами с помощью блоков из подлибрарии Зубчатых колес. Это руководство показывает, как использовать эти блоки для моделирования планетарного train. Зубчатый train содержит четыре тела:
Солнечная передача
Планетарная передача
Кольцевая передача
Планета-носитель
Каждое тело, включая носитель планеты, может вращаться вокруг своей центральной оси. В сложение каждая планетарная передача может вращаться вокруг солнечной передачи. Блоки соединений обеспечивают необходимые степени свободы, в то время как блоки ограничений передачи обеспечивают перемещение передач так, как если бы они были зацеплены.
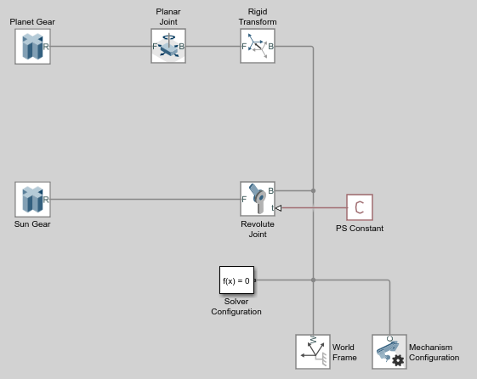
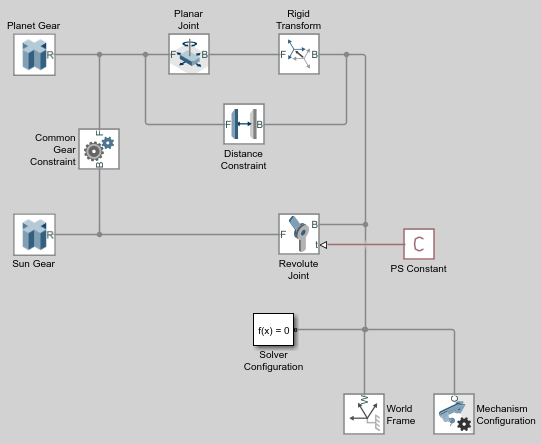
Моделируйте зубчатые тела и соединяйте их с надлежащими степенями свободы. На более позднем этапе вы добавляете ограничения передачи к этой модели.
Перетащите эти блоки в новую модель.
| Библиотека | Блок | Количество |
|---|---|---|
| Body Elements | Extruded Solid | 2 |
| Joints | Revolute Joint | 1 |
| Joints | Planar Joint | 1 |
| Frames and Transforms | Rigid Transform | 1 |
| Frames and Transforms | World Frame | 1 |
| Utilities | Mechanism Configuration | 1 |
| Simscape> Utilities | Solver Configuration | 1 |
Соедините и назовите блоки как показано.
В диалоговое окно блока Sun Gear задайте эти параметры.
| Параметр | Настройка |
|---|---|
| Geometry> Cross-Section |
Введите |
| Geometry> Length | Введите T. Выберите модули измерения cm. |
| Inertia> Density | Введите Rho. |
| Graphic> Visual Properties> Color | Введите Sun.RGB. |
The simmechanics.demohelpers.gear_profile функция генерирует матрицу поперечного сечения для внешней передачи с профилем эвольвентного зуба. Сечение приблизительное. Используйте функцию только как пример.
В диалоговое окно блока Planet Gear задайте эти параметры.
| Параметр | Настройка |
|---|---|
| Geometry> Cross-Section | Введите simmechanics.demohelpers.gear_profile(2*Planet.R,Planet.N,A). Выберите модули измерения cm. |
| Geometry> Length | Введите T. Выберите модули измерения cm. |
| Inertia> Density | Введите Rho. |
| Graphic> Visual Properties> Color | Введите Planet.RGB. |
В диалоговом окне Блока Твердого Преобразования задайте эти параметры.
| Параметр | Настройка |
|---|---|
| Translation> Method | Выберите Standard Axis. |
| Translation> Axis | Выберите +Y. |
| Translation> Offset | Введите Sun.R + Planet.R. Выберите модули измерения cm. |
В рабочем пространстве модели задайте параметры блоков с помощью MATLAB® код:
% Common Parameters Rho = 2700; T = 3; A = 0.8; % Gear Addendum % Sun Gear Parameters Sun.RGB = [0.75 0.75 0.75]; Sun.R = 15; Sun.N = 40; % Planet Gear Parameters Planet.RGB = [0.65 0.65 0.65]; Planet.R = 7.5; Planet.N = Planet.R/Sun.R*Sun.N;
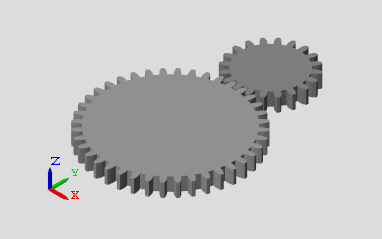
Симулируйте модель. Чтобы вызвать движение, попробуйте настроить состояние скорости в диалоговых окнах блоков соединений. Заметьте, что солнечная и планетарная передачи перемещаются независимо друг от друга. Чтобы ограничить движение передачи, необходимо добавить блок ограничения передачи между твердыми блоками передачи.
Можно открыть копию получившейся модели. В командной строке MATLAB введите smdoc_planetary_gear_a.
Задайте кинематические ограничения, действующие между Солнцем и планетой. Эти ограничения гарантируют перемещение зубчатых колес в сетке.
Перетащите эти блоки в модель передачи Солнце-планета.
| Библиотека | Блок |
|---|---|
| Constraints | Distance Constraint |
| Gears and Couplings> Gears | Common Gear Constraint |
Соедините блоки как показано на рисунке. Новые блоки подсвечиваются.
В диалоговое окно блока «Ограничение общей передачи» задайте эти параметры.
| Параметр | Настройка |
|---|---|
| Specification Method | Выберите Pitch Circle Radii. |
| Specification Method> Base Gear Radius | Введите Sun.R. Выберите модули измерения cm. |
| Specification Method> Follower Gear Radius | Введите Planet.R. Выберите модули измерения cm. |
В диалоговое окно блока Ограничения расстояния задайте этот параметр:
Distance - Ввод Sun.R + Planet.R. Выберите модули измерения cm.
Симулируйте модель. Чтобы вызвать движение, попробуйте настроить состояние скорости в диалоговых окнах блоков соединений. Заметьте, что солнечная и планетарная передачи теперь перемещаются синхронно.
Можно открыть копию получившейся модели. В командной строке MATLAB введите smdoc_planetary_gear_b.
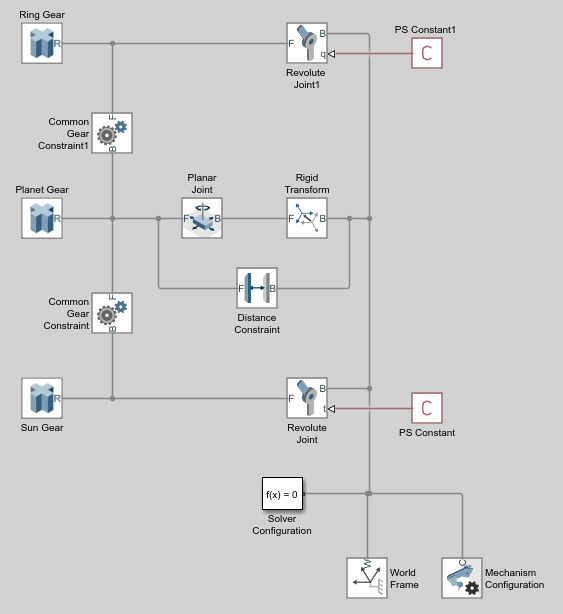
Моделируйте звонок зубчатого тела, соединяйте его с надлежащими степенями свободы и ограничивайте его движение относительно планетарной передачи.
Добавьте эти блоки к модели передачи Солнце-планета.
| Библиотека | Блок |
|---|---|
| Body Elements | Extruded Solid |
| Joints | Revolute Joint |
| Gears and Couplings> Gears | Common Gear Constraint |
Соедините и назовите блоки как показано. Новые блоки подсвечиваются.
В Звонок диалогового окна блока Gear задайте эти параметры.
| Параметр | Настройка |
|---|---|
| Geometry> Cross-Section | Введите Ring.CS. Выберите модули измерения cm. |
| Geometry> Length | Введите T. |
| Inertia> Density | Введите Rho. |
| Graphic> Visual Properties> Color | Введите Ring.RGB. |
В Constraint1 диалогового окна блока Common Gear задайте эти параметры.
| Параметр | Настройка |
|---|---|
| Type | Выберите Internal. |
| Specification Method | Выберите Pitch Circle Radii. |
| Specification Method> Base Gear Radius | Введите Planet.R. Выберите модули измерения cm. |
| Specification Method> Follower Gear Radius | Введите Ring.R. Выберите модули измерения cm. |
В рабочем пространстве модели задайте параметры блоков Ring Gear с помощью кода MATLAB:
% Ring Gear Parameters Ring.RGB = [0.85 0.45 0]; Ring.R = Sun.R + 2*Planet.R; Ring.N = Ring.R/Planet.R*Planet.N; Ring.Theta = linspace(-pi/Ring.N,2*pi-pi/Ring.N,100)'; Ring.RO = 1.1*Ring.R; Ring.CSO = [Ring.RO*cos(Ring.Theta) Ring.RO*sin(Ring.Theta)]; Ring.CSI = simmechanics.demohelpers.gear_profile(2*Ring.R,Ring.N,A); Ring.CSI = [Ring.CSI; Ring.CSI(1,:)]; Ring.CS = [Ring.CSO; flipud(Ring.CSI)];
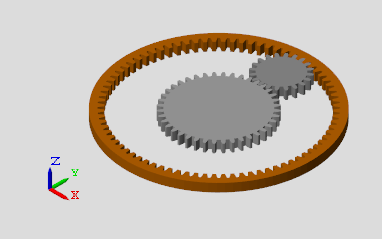
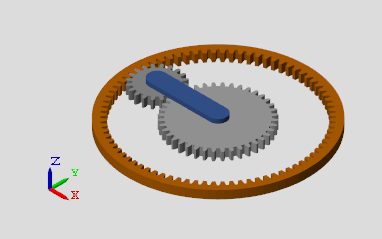
Симулируйте модель. Чтобы вызвать движение, попробуйте настроить состояние скорости в диалоговых окнах блоков соединений. Заметьте, что Солнце, планета и кольцевые передачи перемещаются в сетке.
Можно открыть копию получившейся модели. В командной строке MATLAB введите smdoc_planetary_gear_c.
До сих пор вы держали солнечную и планетарную передачи на фиксированном расстоянии с помощью блока ограничения расстояния. В фактической планетарной передаче носитель зубчатой передачи применяет это ограничение. Моделируйте трансмиссию и соединяйте ее между Солнцем и планетой.
Удалите эти блоки из модели планетарной передачи:
Planar Joint
Rigid Transform
Distance Constraint
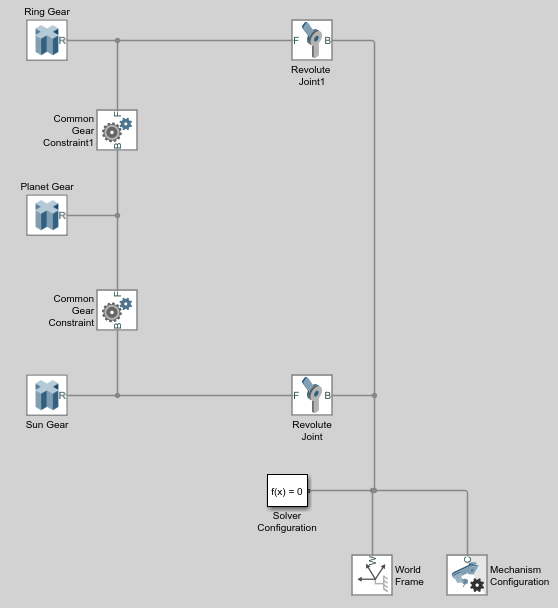
Добавьте эти блоки к модели планетарной передачи.
| Библиотека | Блок | Количество |
|---|---|---|
| Body Elements | Extruded Solid | 1 |
| Joints | Revolute Joint | 2 |
| Frames and Transforms | Rigid Transform | 2 |
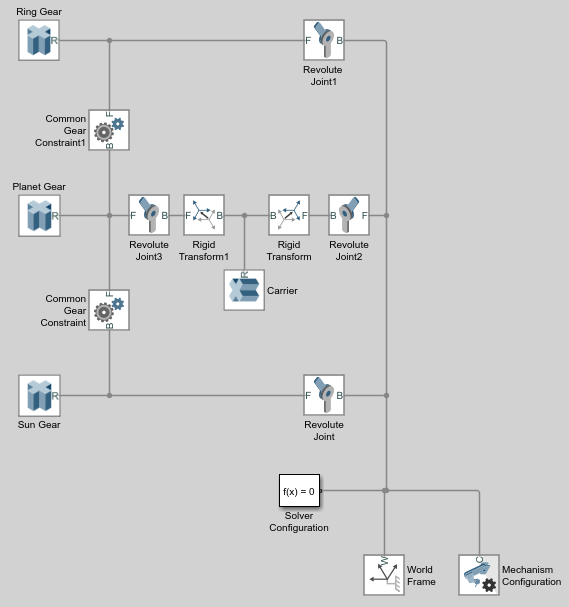
Соедините и назовите блоки как показано.
Обратите пристальное внимание на ориентацию блока Твердого Преобразования: порты B-системы координат должны быть обращены к блоку Solid. Новые блоки подсвечиваются.
В диалоговое окно блока Carrier задайте эти параметры.
| Параметр | Настройка |
|---|---|
| Geometry> Cross-Section | Введите Carrier.CS. Выберите модули измерения cm. |
| Geometry> Length | Введите Carrier.T. |
| Inertia> Density | Введите Rho. |
| Graphic> Visual Properties> Color | Введите Carrier.RGB. |
В диалоговом окне Блока Твердого Преобразования задайте эти параметры.
| Параметр | Настройка |
|---|---|
| Translation> Method | Выберите Cartesian. |
| Translation> Offset | Введите [Carrier.L/2 0 -(Carrier.T+T)/2]. Выберите модули измерения cm. |
В Transform1 диалогового окна блока задайте эти параметры.
| Параметр | Настройка |
|---|---|
| Translation> Method | Выберите Cartesian. |
| Translation> Offset | Введите [-Carrier.L/2 0 -(Carrier.T+T)/2]. Выберите модули измерения cm. |
В рабочем пространстве модели задайте параметры блоков Carrier с помощью кода MATLAB:
% Gear Carrier Parameters Carrier.RGB = [0.25 0.4 0.7]; Carrier.L = Sun.R + Planet.R; Carrier.W = 2*T; Carrier.T = T/2; Theta = (90:1:270)'*pi/180; Beta = (-90:1:90)'*pi/180; Carrier.CS = [-Carrier.L/2 + Carrier.W/2*cos(Theta) ... Carrier.W/2*sin(Theta); Carrier.L/2 + Carrier.W/2*cos(Beta), ... Carrier.W/2*sin(Beta)];
Симулируйте модель. Чтобы вызвать движение, попробуйте настроить состояние скорости в диалоговых окнах блоков соединений. Заметьте, что коробка передач теперь выполняет задачу блока Distance Constraint.
Можно открыть копию получившейся модели. В командной строке MATLAB введите smdoc_planetary_gear_d.
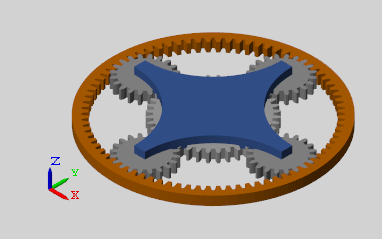
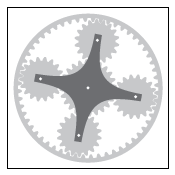
Экспериментируйте с моделью, добавляя больше планетарных передач. Помните, что вы должны изменить корпус несущей, чтобы разместить любые дополнительные планетарные передачи. Чтобы увидеть пример с четырьмя планетарными шестернями, в командной строке MATLAB введите smdoc_planetary_gear_e.