Кинематическое ограничение между телом переводящей рейки и телом вращающейся шестерни
Simscape/Multibody/Передачи и муфты/Передачи

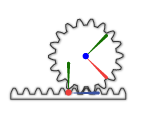
Блок Rack and Pinion Constraint представляет кинематическое ограничение между телом переводящей рейки и телом вращающейся шестерни. Порт базовой системы координат идентифицирует соединительную систему координат на корпусе шестерни, а порт последующей системы координат идентифицирует соединительную систему на корпусе стойки. Ось вращения шестерни и ось перемещения стойки совпадают с осями z систем координат.
Блок представляет только кинематическую характеристику ограничения для системы реечного механизма. Инерция передачи и геометрия являются твердыми свойствами, которые необходимо задать с помощью твердых блоков. Модель ограничения передачи идеальна. Люфт и потери передачи из-за Кулона и вязкого трения между зубьями игнорируются. Однако можно смоделировать вязкое трение в соединениях путем определения коэффициентов демпфирования в блоках соединений.
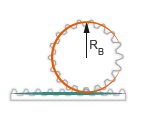
Ограничение «стойка-шестерня» параметризовано с точки зрения размерностей окружности тангажа шестерни. Окружность тангажа является воображаемым кругом, концентрическим телу шестерни и касательным к точке контакта зуба. Радиус тангажа, маркированный RB на рисунке - радиус, который имел бы шестерня, если бы она была уменьшена до цилиндра трения, контактирующего с кирпичным приближением стойки.
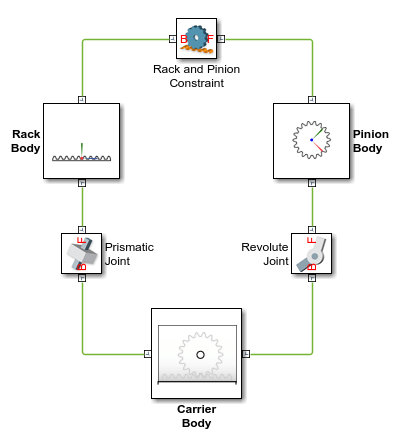
Ограничения на передачу возникают в замкнутых кинематических замкнутых цепях. Рисунок показывает топологию с обратной связью простой модели реечного механизма. Блоки соединений соедините тела стойки и шестерни с общим фиксатором или держателем, определяя максимальные степени свободы между ними. Блок Rack and Pinion Constraint соединяет тела стойки и шестерни, устраняя одну степень свободы и эффективно соединяя движения стойки и шестерни.
Блок накладывает особые ограничения на относительные положения и ориентации систем координат зубчатых соединений. Ограничения гарантируют, что передачи собираются только на расстояниях и углах, подходящих для сетки. Блок применяет ограничения во время сборки блока, когда он впервые пытается поместить передачи в mesh, но полагается на оставшуюся часть модели, чтобы сохранить передачи в mesh во время симуляции.
Ограничения положения
Расстояние между основанием и последующей системой координат вдоль последующей системы координат y оси должно равняться радиусу шестерни. Это ограничение гарантирует, что точка тангажа стойки находится на правильном расстоянии от оси вращения шестерни.
Центр последующей системы координат должен лежать на xy плоскости базовой системы координат. Это ограничение гарантирует, что точка тангажа стойки является копланарной с окружностью тангажа шестерни.
Ограничения ориентации
Ось x последующей системы координат должна быть перпендикулярна плоскости xy базовой системы координат. Это ограничение гарантирует, что стойка и шестерня являются копланарными, и поэтому их оси движения перпендикулярны друг другу.

