Кинематическое ограничение между два зубчатых тел скоса с угловыми пересекающимися осями вращения
Simscape/Multibody/Передачи и муфты/Передачи

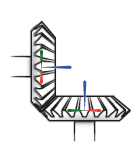
Блок Bevel Gear Constraint представляет кинематическое ограничение между двумя зубчатыми телами с пересекающимися осями вращения, удерживаемыми под заданным углом. Основы и последующей системы координат идентифицируют системы координат соединений на зубчатых телах. Оси вращения шестерни совпадают с рамой соединения z -осями. Передачи вращаются с фиксированным отношением скорости, определяемым радиусами тангажа передачи.
Блок представляет только кинематическую характеристику ограничения для конической зубчатой системы. Инерция передачи и геометрия являются твердыми свойствами, которые необходимо задать с помощью твердых блоков. Модель ограничения передачи идеальна. Люфт и потери передачи из-за Кулона и вязкого трения между зубьями игнорируются. Однако можно смоделировать вязкое трение в соединениях путем определения коэффициентов демпфирования в блоках соединений.
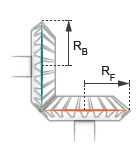
Ограничение конической передачи параметризовано с точки зрения размерностей кругов тангажа передачи. Круги тангажа являются воображаемыми кругами, концентрическими с зубчатых тел и касательной к точке контакта зуба. Радиусы тангажа, маркированные RB и RF На рисунке показаны внешние радиусы, которые имели бы зубчатые колеса, если бы они были сведены к конусам трения во взаимном контакте.
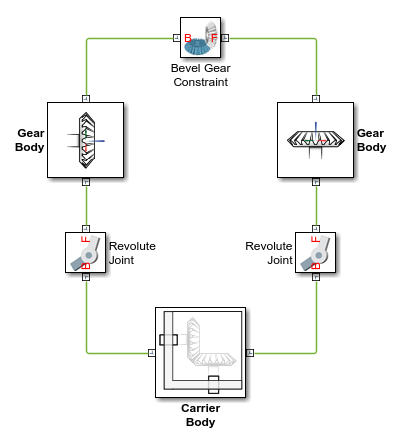
Ограничения на передачу возникают в замкнутых кинематических замкнутых цепях. Рисунок показывает топологию с обратной связью простой модели конического зубчатого колеса. Блоки соединений соединяют зубчатые тела с общим фиксатором или водилом, определяя максимальные степени свободы между ними. Блок Bevel Gear Constraint соединяет зубчатые тела, устраняя одну степень свободы и эффективно соединяя движения зубчатых колес.
Блок накладывает особые ограничения на относительные положения и ориентации систем координат зубчатых соединений. Ограничения гарантируют, что передачи собираются только на расстояниях и углах, подходящих для сетки. Блок применяет ограничения во время сборки блока, когда он впервые пытается поместить передачи в mesh, но полагается на оставшуюся часть модели, чтобы сохранить передачи в mesh во время симуляции.
Ограничения положения
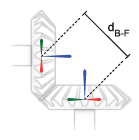
Расстояние между основой и последующими системами координат должно быть таким, чтобы при заданных угле вала и тангажа радиусах окружности тангажа передачи были касательными друг к другу. Это расстояние, обозначенное d B-F, следует из закона косинусов:
где R B - радиус тангажа базовой передачи, R F - радиус тангажа последующей передачи, а θ вал - угол пересечения осей вращения.
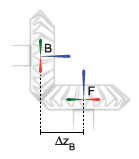
Расстояние между основанием и последующей системой координат вдоль оси z базовой системы координат, обозначенное Δz B, должно быть равно:
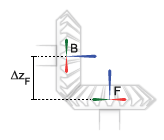
Расстояние между основанием и последующей системой координат вдоль оси z последующей системы координат, обозначенное Δz F, должно быть равно:
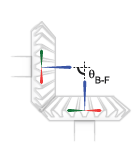
Ограничения ориентации
Воображаемые линии, простирающиеся от основы и последующей оси Z, должны пересекаться с углом вала, заданным в диалоговом окне блока. Угол на рисунке обозначается В-Ф. Если для параметра Shaft Axes задано значение Perpendicular, угол 90 °.
Bevel Gear Constraint | Brick Solid | Common Gear Constraint | Cylindrical Solid | Ellipsoidal Solid | Extruded Solid | Rack and Pinion Constraint | Revolved Solid | Spherical Solid

